Examples and tips
PROGRAMMING MANUAL 268
Revision 1.0
The evident solution is: n = 100 and m = 1224. Or, when we simplify the
factors: n = 25 and m = 306. Therefore: Pn205 = m – 1 = 305. With these
settings, executing MOVE(180) moves the moving part 180 tenths of an
angle degree or 18 angle degrees in forward direction.
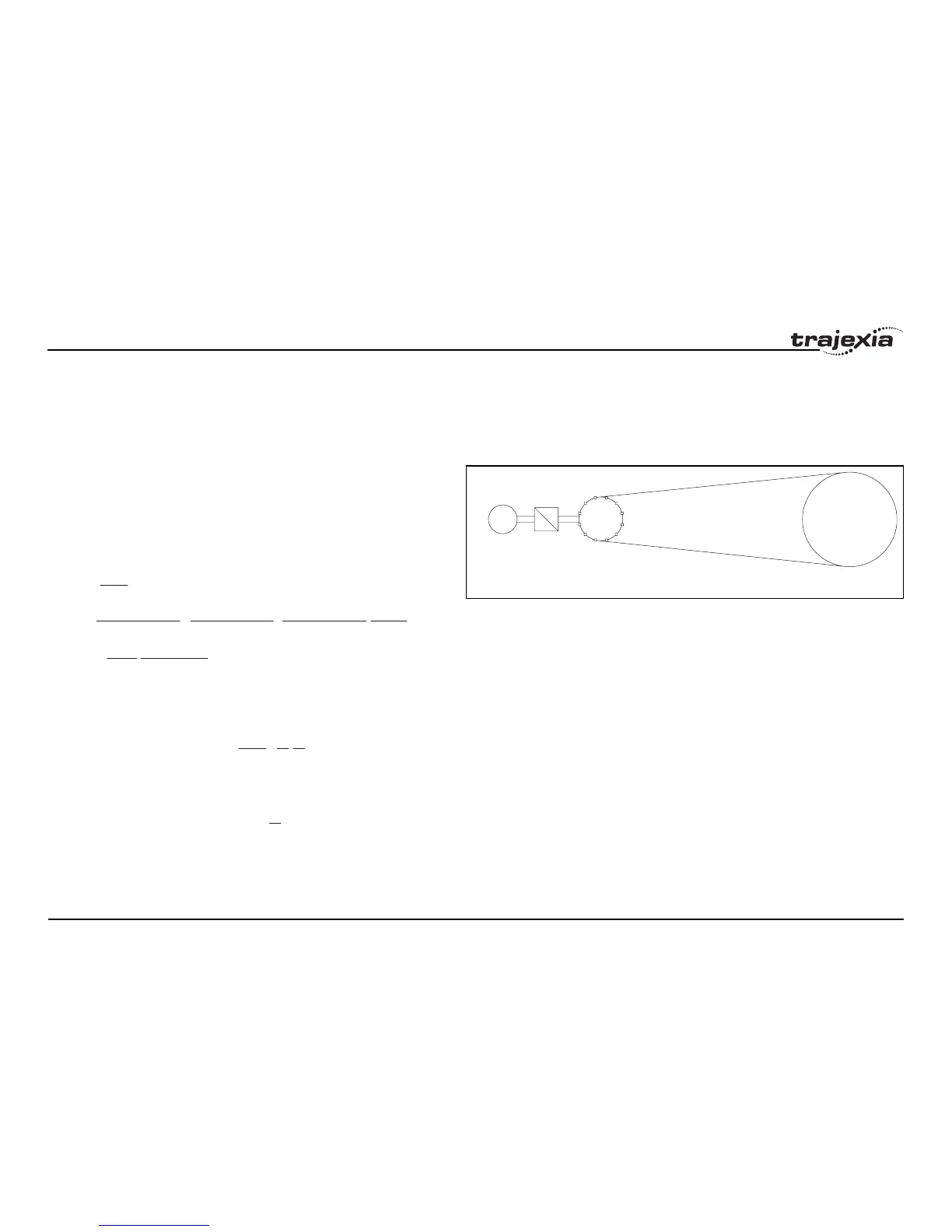
Example 5
fig. 23
The mechanical system uses a servo motor with a 17-bit absolute encoder.
The mechanical gear ratio of the gearbox is 1:10. The pulley has got 12
teeth, and each two are 50 mm apart. One complete turn of the pulley
equals 144 stations on the main wheel. The distance between two stations is
50 mm. The mechanical measurement units must mm. Total repeat distance
must be the distance between two stations, 50mm.
With the same procedure as in example 1, we have:
Therefore, if we use the mechanical system to set the electronic gear ratio,
we have:
One possible solution is:
M
17-bit absolute
encoder
1:10 Gear
Pulley: 12 teeth
50mm between teeth
Main Wheel: 144 stations
50 mm between stations
Pn202
Pn203
UNITS =
2
17
encoder_counts
1 motor_revolution
1 pulley_revolution
10 motor_revolution
12 station
1 pulley_revolution
12 50
2
17
10 encoder_counts
mm
=
50mm
1 station
=
.
.
.
.
.
..
.
.
..
Pn202
Pn203
UNITS
50
2
17
10
=
12
Pn202 = 5
Pn203 = 6
Pn205 = 4
UNITS =
50
2
1