Examples and tips
PROGRAMMING MANUAL 297
Revision 1.0
fig. 40
The motion profile and its modification due to the registration mark are
shown in fig. 39.
The BASIC program for this example is:
DEFPOS(0)
REGIST(3) 'Trigger the mark registration
MOVE(bag_length) 'Move to the theoretical distance
WA(1)
WAIT UNTIL MARK OR MTYPE=0
IF MARK THEN
end_position=REG_POS+distance_after_mark
MOVEMODIFY(end_position)
'Correct the distance according to the mark
ENDIF
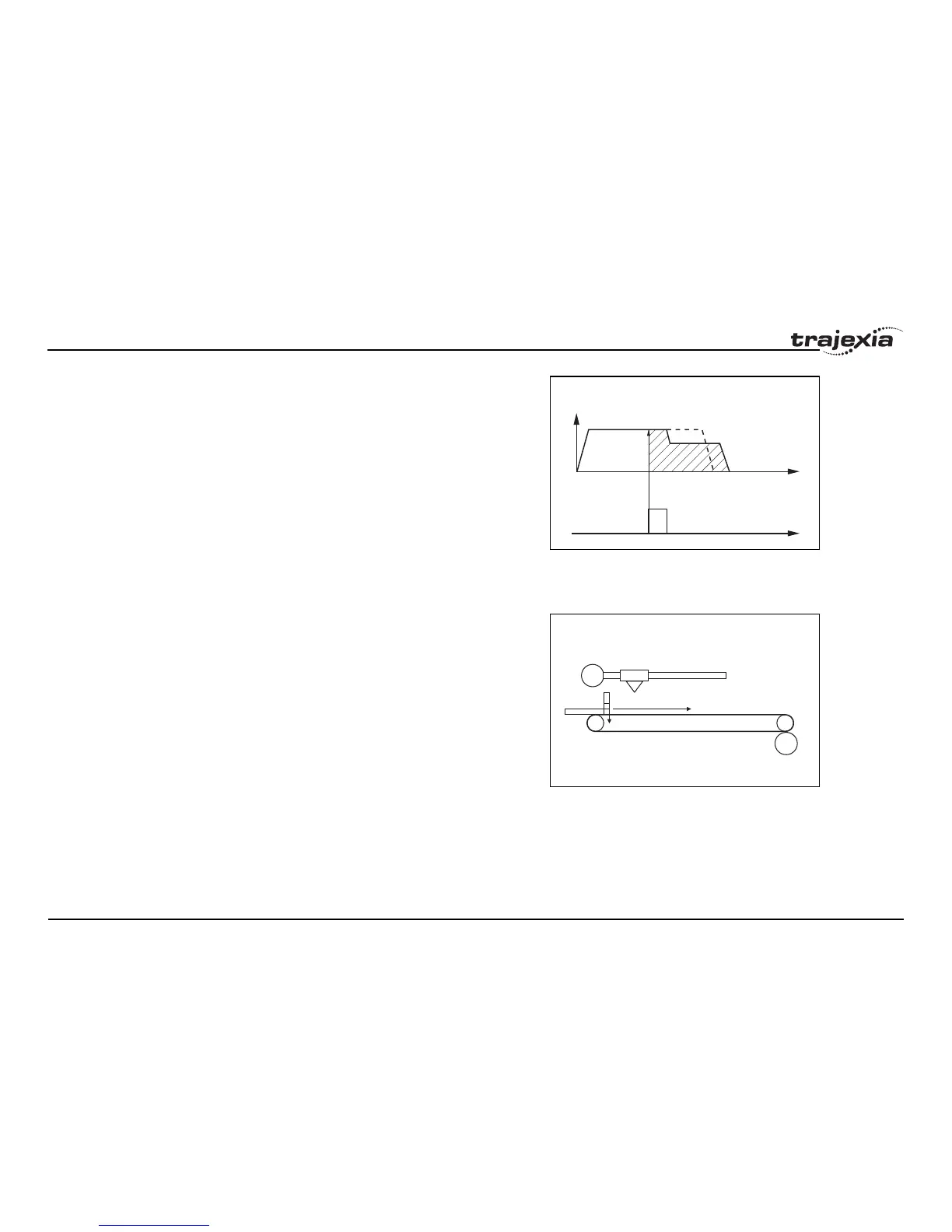
Example: Starting a slave axis in precise position of a master
axis
fig. 41
The picture shows a flying shear cutting the "head" of wood tables. When
the wood comes, the edge of the wood is detected by the photocell and, at
the exact moment, the movement of the flying shear starts to be
synchronized with the right position on the wood.
If the movement is started by the program, upon detecting a signal from the
photocell, there is always at least one SERVO_PERIOD of time of
uncertainty. Instead, the movement is started using the MOVELINK
command with link_option=1, which means that the link to the master axis
starts when the registration event occurs on link (master) axis.
The corresponding program sequence is:
REGIST(2) AXIS(master)
MOVELINK(dst,lnk_dst,lnk_acc,lnk_dec,master,1) AXIS(slave)
For more information on the MOVELINK command and the link_option
argument, refer to section 3.2.196.
t
t
2- The new target position is recalculated:
TARGET POS=CAPTURED POS+"D"
1- The rising edge of
the registration captures
the feeder position
The area below the graph
(distance) is "D"
Feeder
speed
E
E
Master axis
Slave axis
Flying shear
Transporting belt