Examples and tips
PROGRAMMING MANUAL 327
Revision 1.0
FE_LIMIT=1073741824/P_GAIN/UNITS
'SPEED is set to 1/3 of "max_speed
SPEED=(max_speed73)*enc_resolution/60/UNITS
'ACCEL in 200ms from 0 to "max_speed"
ACCEL=SPEED/0.2
'DECEL in 200ms from "max_speed" to 0
DECEL=SPEED/0.2
5.2.3 Single axis program
fig. 48
This program is a simple program to run one axis only.
Example
'GOSUB homing
BASE(0)
DEFPOS(0)
WA(100)
loop:
MOVE(1440)
WAIT IDLE
WA(100)
GOTO loop
The units are degrees in this example, therefore:
• 13-bit encoder
• Pn202=32
• Pn203=45
• UNITS=32
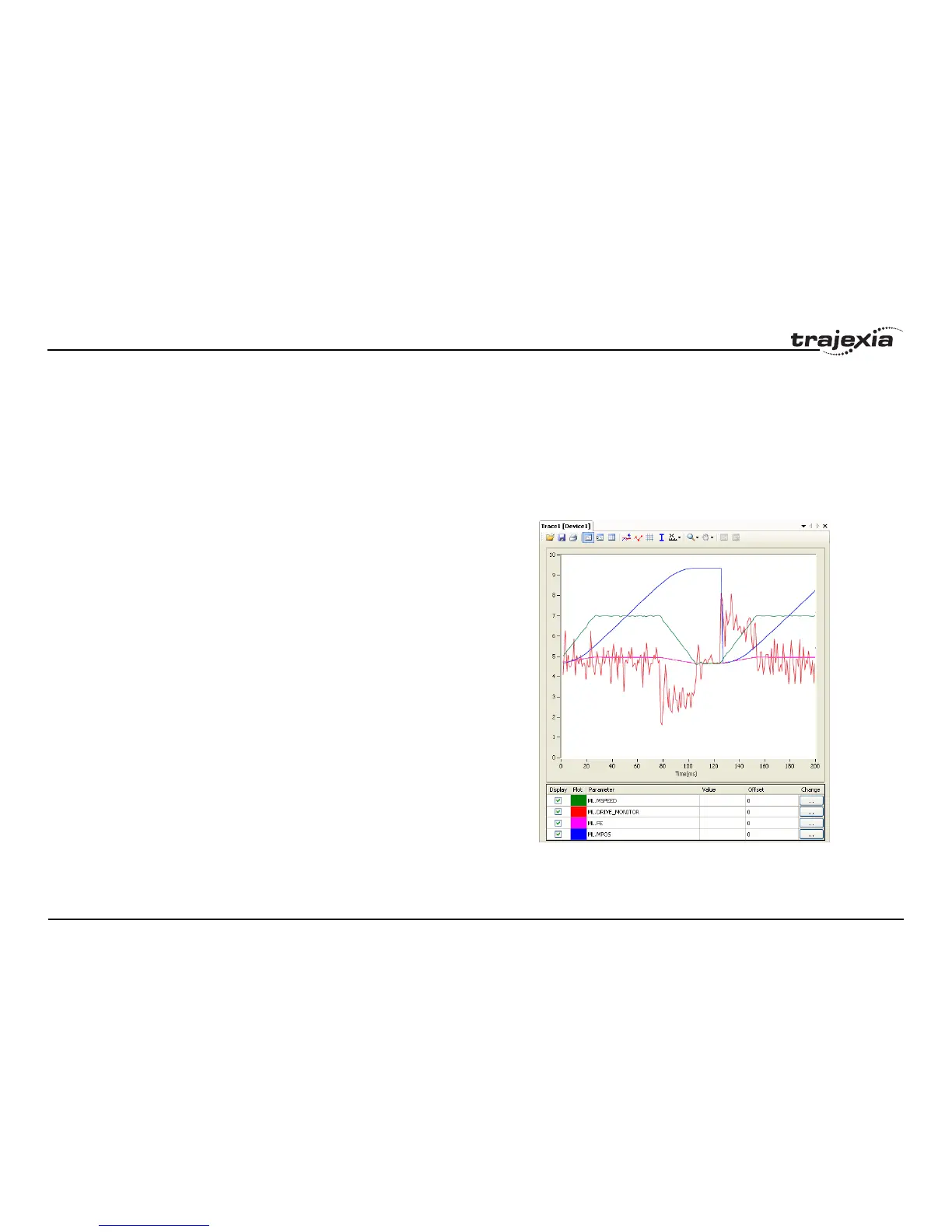
The graph in the figure is typical for this point-to-point movement with linear
acceleration). Note the following:
• During linear acceleration, the graph of the position is parabolic
(because the speed is a derivative of the position).
• During constant speed, the graph of the position is straight.
• During linear deceleration, the graph of the position is counter-parabolic.
• During stop, the graph of the position is constant.
• When an overflow occurs (MPOS>=REP_DIST), the position jumps to 0
if REP_OPTION=1 or to -REP_DIST if REP_OPTION=0.