BASIC commands
PROGRAMMING MANUAL 34
Revision 1.0
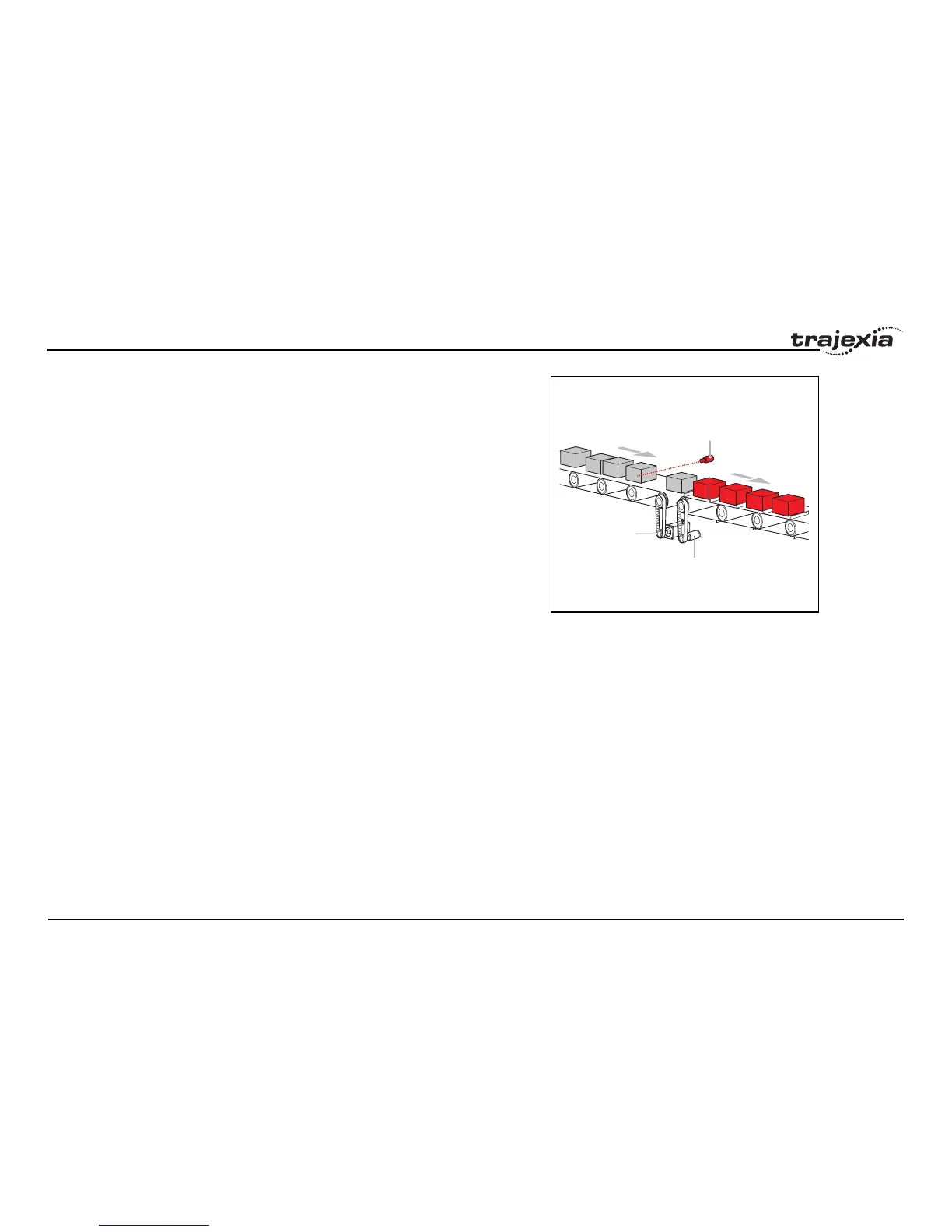
fig. 3/i
MOTOR
AXIS 0
ENCODER
AXIS 2
R AXIS 0
Example Pieces are placed randomly onto a belt that moves continuously. Further
along the line they are transferred to a second flighted belt. A detection sys-
tem indicates if a piece is in front of or behind its nominal position, and how
far.
expected=2000 ' sets expected position
BASE(0)
ADDAX(1)
CONNECT(1,2) ' continuous geared connection to flighted belt
REPEAT
GOSUB getoffset ' get offset to apply
MOVE(offset) AXIS(1) ' make correcting move on virtual axis
UNTIL IN(2)=OFF ' repeat until stop signal on input 2
RAPIDSTOP
ADDAX(-1) ' clear ADDAX connection
STOP
getoffset: ' sub routine to register the position of the
' piece and calculate the offset
BASE(0)
REGIST(3)
WAIT UNTIL MARK
seenat=REG_POS
offset=expected-seenat
RETURN
Axis 0 in this example is connected to the encoder of the second conveyor. A
superimposed MOVE on axis 1 is used to apply offsets.