BASIC commands
PROGRAMMING MANUAL 87
Revision 1.0
/i
3.2.96 DRIVE_MONITOR
/i
3.2.97 DRIVE_READ
/i
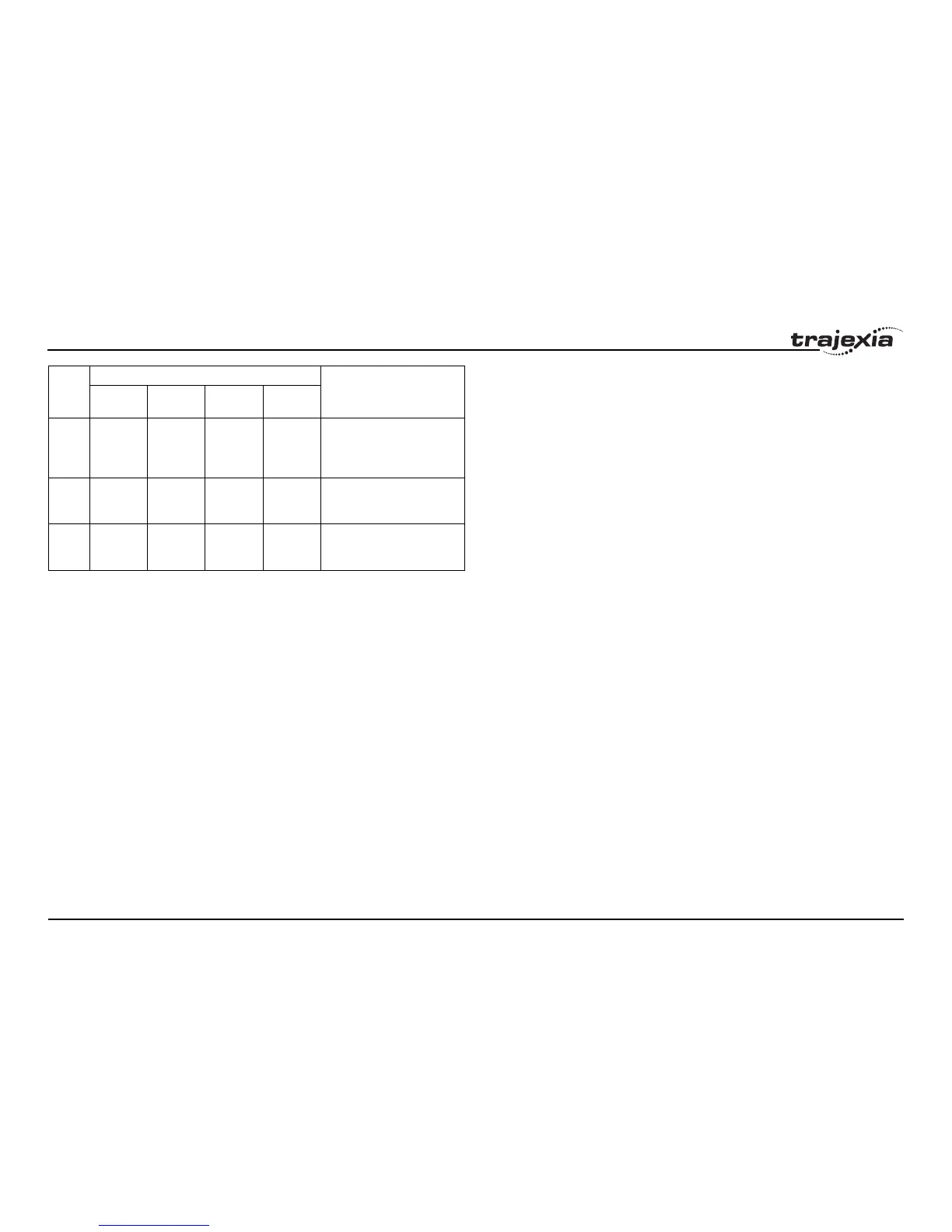
13 IO13 IO13 Not used NCL General input 13 (Sigma-II
and Sigma-V), Torque limit
input in negative direction (G/
G5)
14 IO14 IO14 Not used SI0 General input 14 (Sigma-II
and Sigma-V), General input
0 (G/G5)
15 IO15 IO15 Not used SI1 General input 15 (Sigma-II
and Sigma-V), General input
1 (G/G5)
Refer to section 5.1.4 for more information about mapping Servo Drive inputs
and outputs.
The command is executed on the Drive for the base axis set by BASE. The
base axis can be changed with the AXIS modifier, as with all the other axis
commands and parameters.
Arguments N/A
Example No example.
See also N/A
Type Axis parameter
Syntax DRIVE_MONITOR
Bit no. Servo Drive input signal Description
Sigma-II Sigma-V Junma G/G5-
series
Description This parameter contains the monitored data of the Servo Drive connected to
the system via the MECHATROLINK-II bus. The data to be monitored is
selected using DRIVE_CONTROL and can be displayed in the Trajexia Stu-
dio scope or used inside a program. The monitored data is updated each
SERVO_PERIOD. The command is executed on the Drive for the base axis
set by BASE. The base axis can be changed with the AXIS modifier, as with
all the other axis commands and parameters.
Arguments N/A
Example No example.
See also N/A
Type Axis command
Syntax DRIVE_READ(parameter, size, VR)
Description The DRIVE_READ function reads the specified parameter of the Servo Drive
connected to the Trajexia system via the MECHATROLINK-II bus. Upon suc-
cessful execution, this command returns -1 and puts the read value in the VR
memory location specified by the VR parameter. If the command cannot be
executed, the value 0 is returned. The command is executed on the Drive for
the base axis set with BASE. It can be changed using the AXIS modifier, like
with all the other axis commands and parameters.
Notes:
• This command waits for the response of the axis so, its execution is slow
and the time variable. Do not use this command together with other com-
mands that require quick execution.
• Executing a DRIVE_READ will temporarily disable the Servo Drive Front
Panel display.
• DRIVE_READ returns -1 on success. It also returns -1 with no parameter
read if the parameter number does not exist or has the wrong size.
• Reading of parameters is not possible when registration is active in order
to give priority to registration.