2017-04
26
Absolute Rotary Encoder
Quick Start Guide
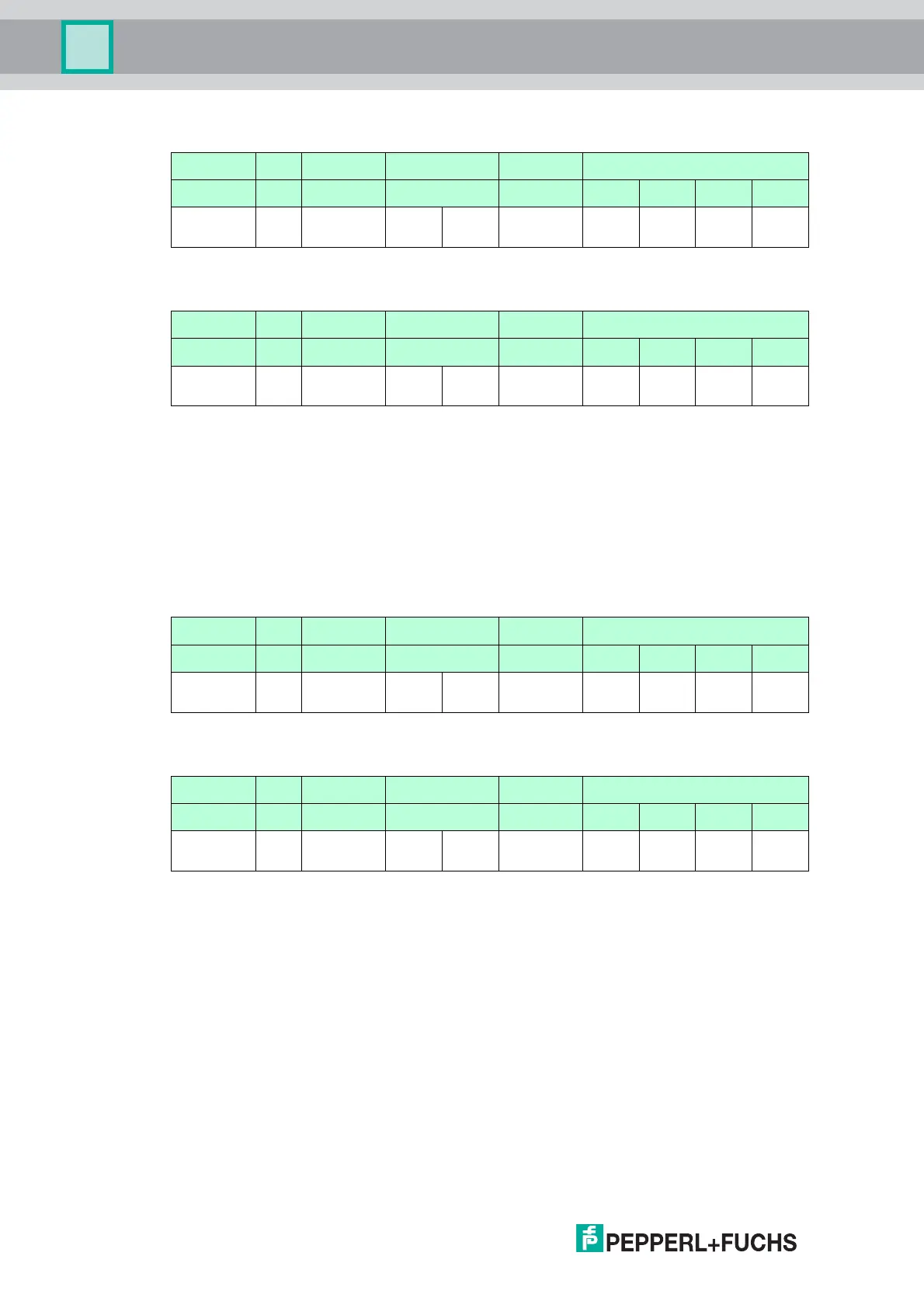
Message sent to Encoder
Message received from Encoder
Configuration of total Measuring Range
Object 6002h
Example: 7200 dec >> 00001C20h
Explanation: The encoder will output 7200 steps within 2 revolution and starts again with 0.
There is no mechanical limitation, if the encoder is driven continuously in one direction. Value
must be lower or equal than given on the nameplate.
Message sent to Encoder
Message received from Encoder
Configuration of Preset Value
Object 6003h
Example: 10 dec >> 0000000Ah
Explanation: You set the encoder output position value to a desired position value in your
machine. The value is set in the encoder, when the telegram is sent and confirmed. Do this
operation during standstill of the encoder shaft to increase the accuracy, because the device is
calculating itself an offset value. If you set the preset dynamically, which is not recommended,
then you have also to take bus latency time into consideration and encoder internal cycle time.
Identifier DLC Command Index Subindex Service/Process data
NN = Bh Download 6001h 00h Byte 4 Byte 5 Byte 6 Byte 7
600h + NN
= 60Bh
8h 22h 01h 60h 00h 10h 0Eh 00h 00h
Ta b l e 7 . 8
Identifier DLC Command Index Subindex Service/Process data
NN Download 6001h 00h Byte 4 Byte 5 Byte 6 Byte 7
580h + NN
= 58Bh
8h 60h 01h 60h 00h 00h 00h 00h 00h
Ta b l e 7 . 9
Identifier DLC Command Index Subindex Service/Process data
NN = Bh Download 6002h 00h Byte 4 Byte 5 Byte 6 Byte 7
600h + NN
= 60Bh
8h 22h 02h 60h 00h 20h 1Ch 00h 00h
Ta b l e 7 . 1 0
Identifier DLC Command Index Subindex Service/Process data
NN Download 6002h 00h Byte 4 Byte 5 Byte 6 Byte 7
580h + NN
= 58Bh
8h 60h 02h 60h 00h 00h 00h 00h 00h
Ta b l e 7 . 1 1