Absolute Rotary Encoder
Quick Start Guide
2017-04
27
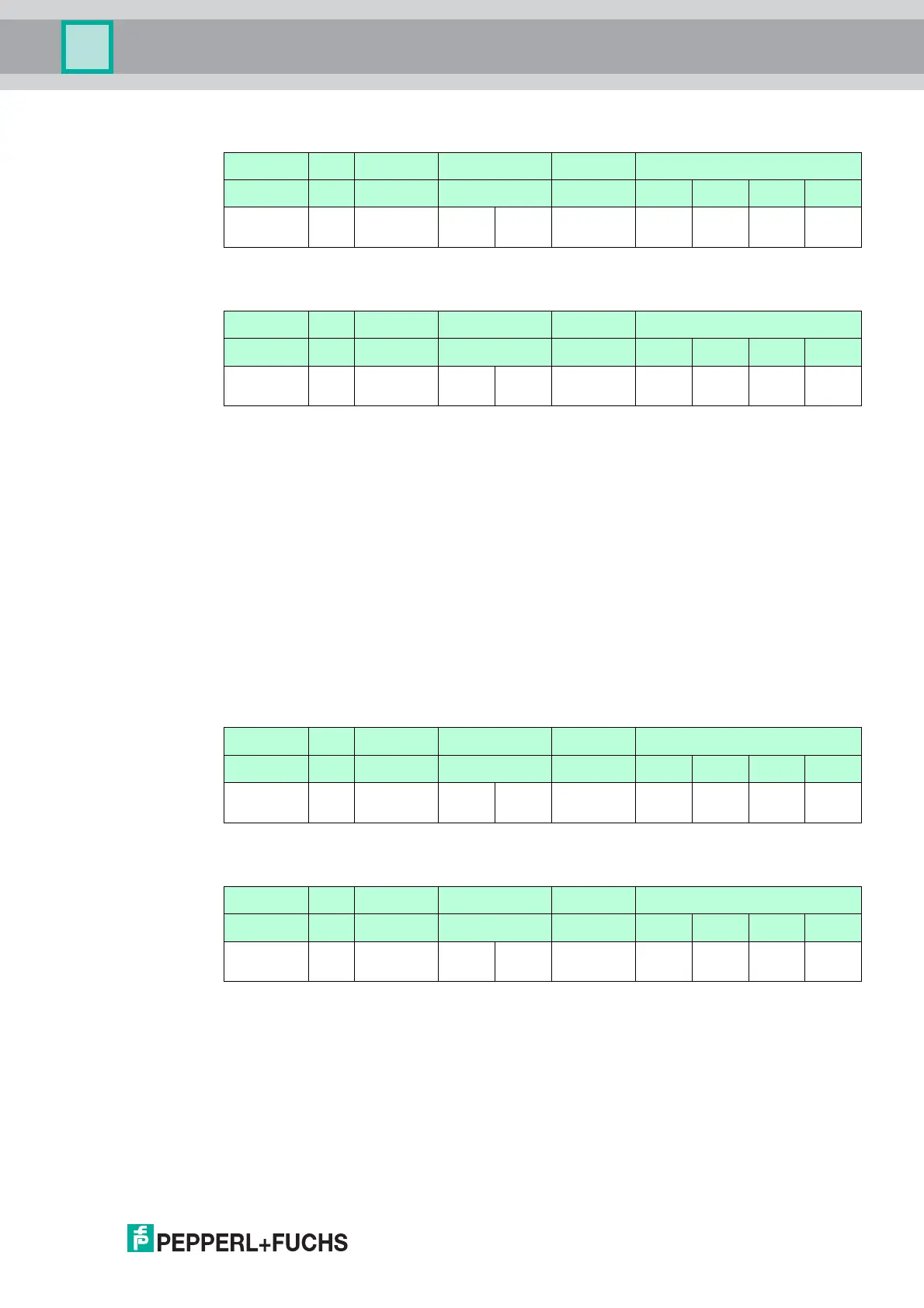
Message sent to Encoder
Message received from Encoder
If preset value is used, then please execute the store configuration, otherwise you will see a
position jump after power cycle. It is in general recommended to store after a changed
configuration.
Transmission of Position Value: cyclic
If you want, that the encoder transmits its position value cyclically without request from the
PLC/CAN master, then configure the following object used for TPDO1. Remark: By default the
value is set to 0, that means the value is not transmitted.
Object 1800h, Subindex 5h
Example: 100 dec >> 0064h
Explanation: The encoder will end each 100 ms its position value after receiving a NMT start
command in status operational.
Message sent to Encoder
Message received from Encoder
Identifier DLC Command Index Subindex Service/Process data
NN = Bh Download 6003h 00h Byte 4 Byte 5 Byte 6 Byte 7
600h + NN
= 60Bh
8h 22h 03h 60h 00h 20h 1Ch 00h 00h
Ta b l e 7 . 1 2
Identifier DLC Command Index Subindex Service/Process data
NN Download 6003h 00h Byte 4 Byte 5 Byte 6 Byte 7
580h + NN
= 58Bh
8h 60h 03h 60h 00h 00h 00h 00h 00h
Ta b l e 7 . 1 3
Identifier DLC Command Index Subindex Service/Process data
NN = Bh Download 1800h 05h Byte 4 Byte 5 Byte 6 Byte 7
600h + NN
= 60Bh
8h 22h 00h 18h 05h 64h 00h 00h 00h
Ta b l e 7 . 1 4
Identifier DLC Command Index Subindex Service/Process data
NN Download 1800h 05h Byte 4 Byte 5 Byte 6 Byte 7
580h + NN
= 58Bh
8h 60h 00h 18h 05h 00h 00h 00h 00h
Ta b l e 7 . 1 5