41 | P a g e
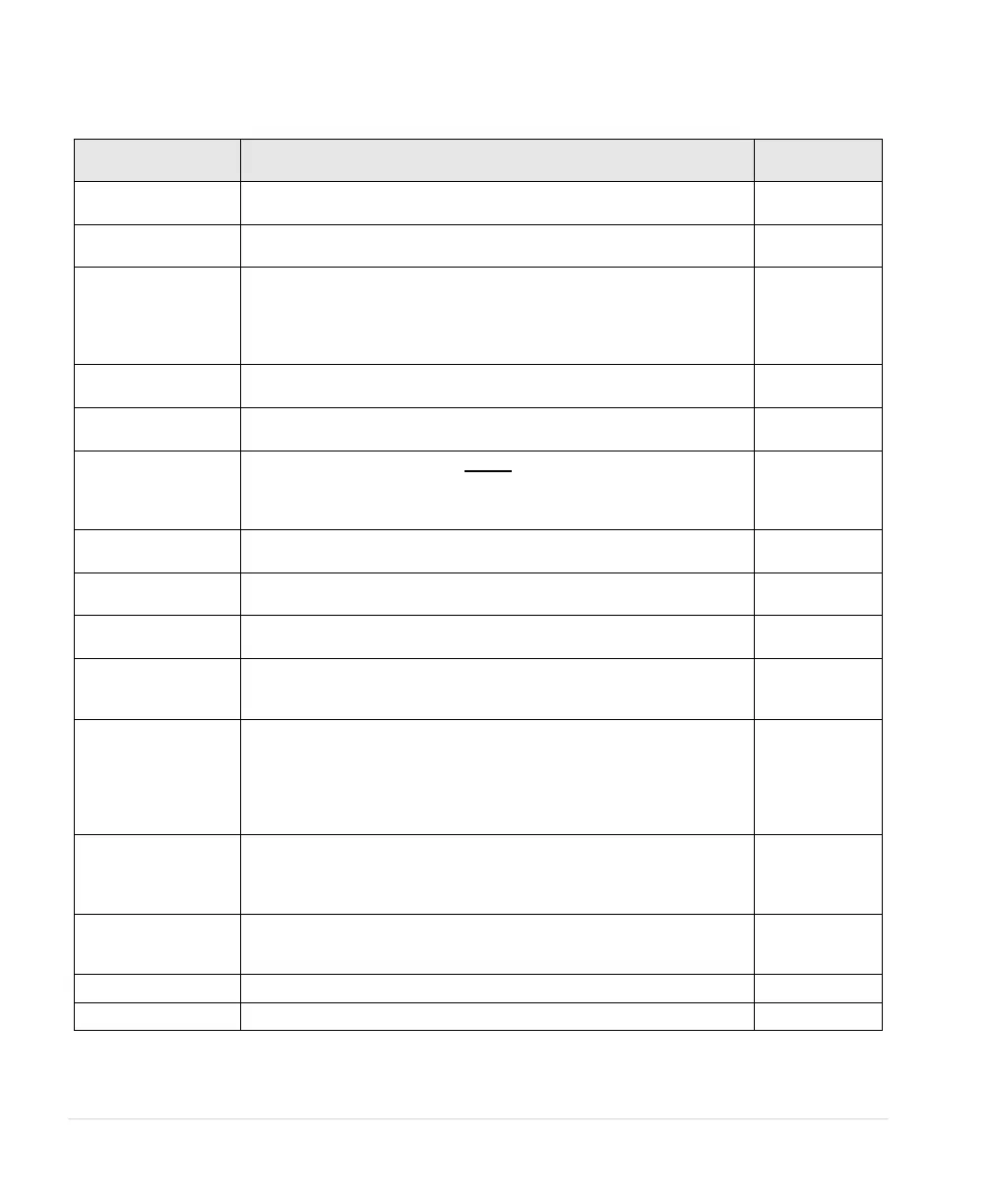
Table 15 - Constant Pressure Parameters
psi at which unit will determine there is a broken pipe. Value of zero
disables this feature.
In minutes. Time at which measured pressure is below BROKEN PIPE
PSI, unit will fault out.
In seconds. Used to prevent short cycling in CP systems. If the motor
was off during the last cycle for a period greater than TOFF, the
minimum on time of the motor is T1ON. If the motor was off for a period
less than TOFF, the minimum on time of the motor is T2ON. Default
values give a minimum cycle time of about 1 minute.
In seconds. See T OFF above. T1ON should be set to be less than
T2ON.
In seconds. See T OFF above. T1ON should be set to be less than
T2ON.
As Hz. This parameter value is added to the frequency set by the
parameter MINIMUM FREQ. The combined value is the frequency at
which drive will enter sleep mode when pressure is controlled at the set
point.
As psi. The parameter value specifies a pressure increase in psi before
sleep mode. The value is added to psi SETPOINT.
In Hz. Sets the maximum frequency applied to the motor during the pre-
charge interval.
In minutes. Sets the maximum time for pre-charge regardless of any
sensor inputs. A setting of zero disables the pre-charge mode.
Used only for analog CP systems. Pre-charge will be terminated when
pressure reaches this set point. Should be set less than psi
SETPOINT.
Multiplier for the analog error signal in an analog constant pressure
system. When parameter is set to a value of zero the keypad displays
SIMPLE MODE and the controller switches to an algorithm which does
not require a gain setting. See Section 7.8, Troubleshooting Constant
Pressure Systems, for details. When using PI control, best results will
be obtained by starting with a value of 5 for PROPORTIONAL GAIN.
Multiplier for the integral term in PI control of analog constant pressure.
Used to fine tune control of unstable systems. Parameter is disabled
when PROPORTIONAL GAIN is set to SIMPLE MODE. See Section
7.8, Troubleshooting Constant Pressure Systems, for details.
Used to reduce overshoot and oscillation. Should be used only when
necessary because it tends to amplify noise in the transducer signal. It
may cause the system to become unstable.
Controls the rate of frequency increase in response to the error term.
Sample interval for the PID Filter Gain.