Chapter 5 Function parameter
59
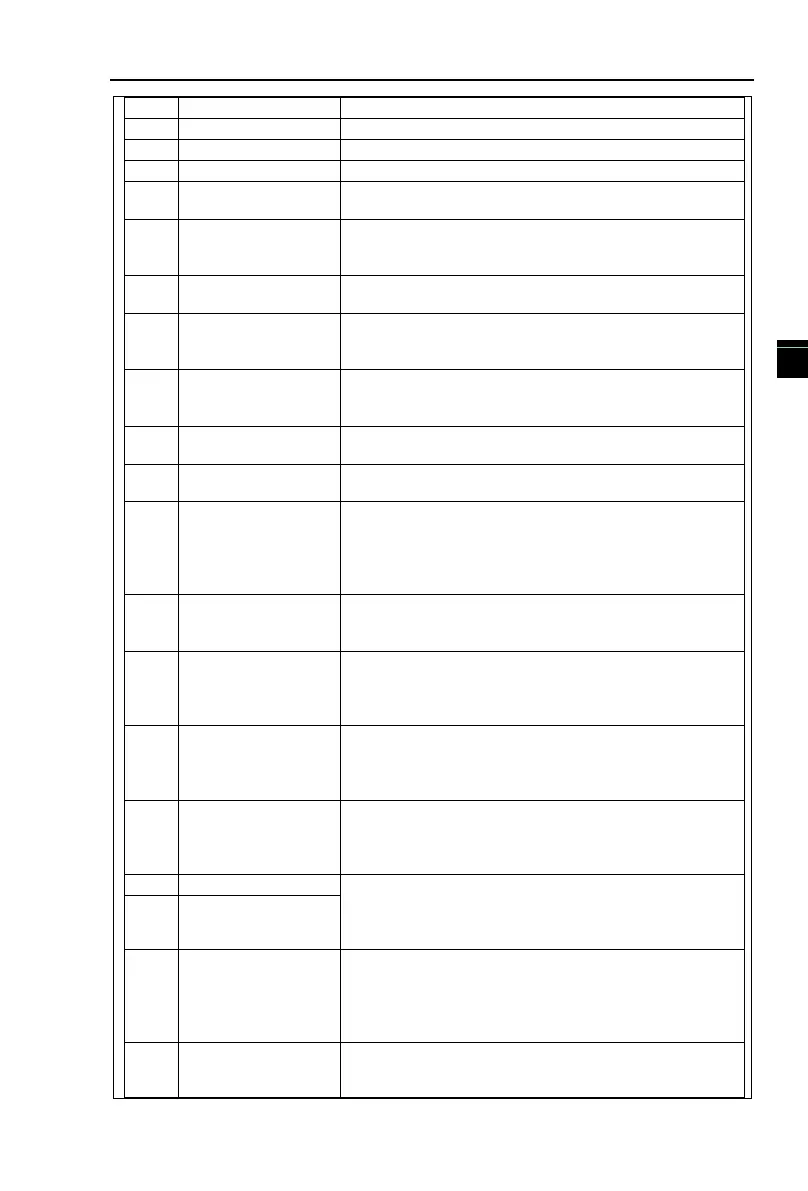
Input terminal of the count pulse.
Input terminal of the length count.
Torque control
prohibited
When the inverter torque control is prohibited, the inverter
will enter speed control mode.
High-speed pulse
input(only valid for
DI5 )
DI5 is used as pulse input terminal.
If the terminal is active, the inverter switches directly to
DC braking status
External fault
normally closed input
When the signal of external fault normally closed input is
inputted into the inverter, the inverter will report fault
Err.15 and shutdown.
If the function is set to be valid, when the frequency
changes, the inverter does not respond to frequency
changes until the terminal state is invalid.
PID action direction
as reverse
If the terminal is valid, PID action direction opposites to
the direction set by E2.03
External parking
terminal 1
Under keyboard control mode, the terminal can beused to
stop the inverter, same as STOP key on the keyboard.
Control command
switch terminal 2
Used to switch between terminal control and
communication control. If the command source is selected
as terminal control, the system will be switched to the
communication control mode when the terminal is active;
vice versa.
When the terminal is active, the PID integral
adjustment function is paused, but the proportion and
differential adjustments of PID are still valid.
Switch between
Frequency source
master setting and
preset frequency
When the terminal is active, the frequency source A is
replaced with the preset frequency (F0.01)
Switch between
frequency source
auxiliary setting and
preset frequency
When the terminal is active, the frequency source B is
replaced with the preset frequency (F0.01)
When DI terminal (E2.19 = 1) is used to switch
PID parameters, if the terminal is invalid, PID parameters
use E2.13 to E2.15; if the terminal is valid, PID parameters
use E2.16 to E2.18
When custom fault 1 and custom fault 2 are active,the
inverter respectively alarm fault Err.27 and fault Err.28,
and deals with them according to the mode selected by the
fault protection action F8.19.
Speed control /
torque control
switching
Switch between speed control mode and torque control
mode under vector control mode. If the terminal is invalid,
the inverter will run at the mode defined by E0.00
(Speed/torque control mode); if the terminal is valid, the
inverter will be switched to another mode.
If the terminal is valid, the inverter will park at the fastest
speed, and the current maintains at the set upper limit
during the parking process. This function is used to meet
 Loading...
Loading...

