Using ERSC Add On Instructions (AOI) with RSLogix 5000
Publication ERSC-1521 Rev 1.0 – February 2019
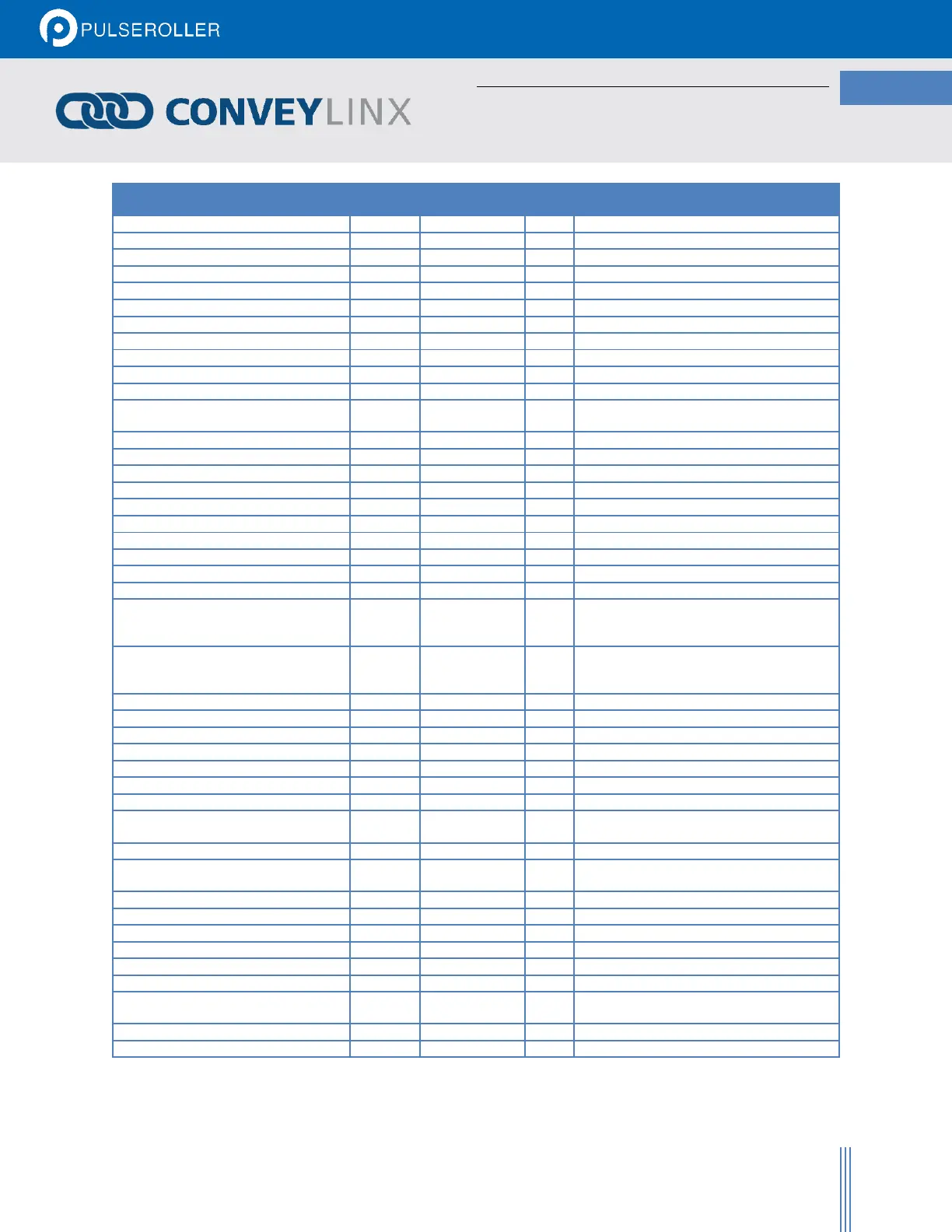
Tag Name Data Type
Developers
Guide Register
Bit Description
Voltage Measured on MDR Power Connection
Clear Motor Error Left & Right
Set Local ConveyStop Command
O_Digital_Mode_Enable_Left
Enable Digital Output Mode for Left Motor Port
O_Digital_Mode_Enable_Right
Enable Digital Output Mode for Right Motor Port
O_Digital_Out_Left_P3_Energize
Energize Digital Output Pin 3 Left Motor Port
O_Digital_Out_Left_P4_Energize
Energize Digital Output Pin 4 Left Motor Port
O_Digital_Out_Right_P2_Energize
Energize Digital Output Pin 2 Right Motor Port
O_Digital_Out_Right_P3_Energize
Energize Digital Output Pin 3 Right Motor Port
O_Enable_Module BOOL -
Enable Output to Module
Value in mm for MDR or Pulses for PGD
Value in mm for MDR or Pulses for PGD
Value in mm for MDR or Pulses for PGD
Value in mm for MDR or Pulses for PGD
On = Run in Opposite of Config. Dir.
On = Run in Opposite of Config. Dir.
O_Mtr_Slave_Mode_Left INT 4:0262 -
1 = OFF: Left motor independently controlled
2 = ON: Left motor mirrors Right motor control
O_Mtr_Slave_Mode_Right INT 4:0272 -
1 = OFF: Right motor independently controlled
2 = ON: Right motor mirrors Left motor control
Value in mm/sec for MDR or RPM x 10 for PGD
Value in mm/sec for MDR or RPM x 10 for PGD
O_Sensor_Prt_Mask_P2_Left
Invert the Active State for the Pin
O_Sensor_Prt_Mask_P2_Right
Invert the Active State for the Pin
O_Sensor_Prt_Mask_P4_Left
Invert the Active State for the Pin
O_Sensor_Prt_Mask_P4_Right
Invert the Active State for the Pin
O_Sensor_Prt_P2_Left_Output_Enable
Enable Sensor Port Pin 2 Left to be an Output
O_Sensor_Prt_P2_Left_Output_Energize BOOL 4:0037 0
Energize Sensor Port Pin 2 Left, Output Enable
must be Energized
O_Sensor_Prt_P2_Right_Output_Enable
Enable Sensor Port Pin 2 Right to be an Output
O_Sensor_Prt_P2_Right_Output_Energize BOOL 4:0037 1
Energize Sensor Port Pin 2 Right, Output Enable
must be Energized
Value in mm for MDR or Pulses for PGD
O_Servo_CmdPosition_Right
Value in mm for MDR or Pulses for PGD
Go to Commanded Position from Position "0"
Go to Commanded Position from Position "0"
Set Current Pulse Count as “0”
Set Current Pulse Count as “0”
O_Tracking_Discharge DINT
4:0201 (MSW)
4:0202 (LSW)
- Tracking 32 Bit for Load Being Discharged

 Loading...
Loading...