Reach Alpha Integration Manual | V006
+61 (2) 9519 7651 | info@reachrobotics.com www.reachrobotics.com
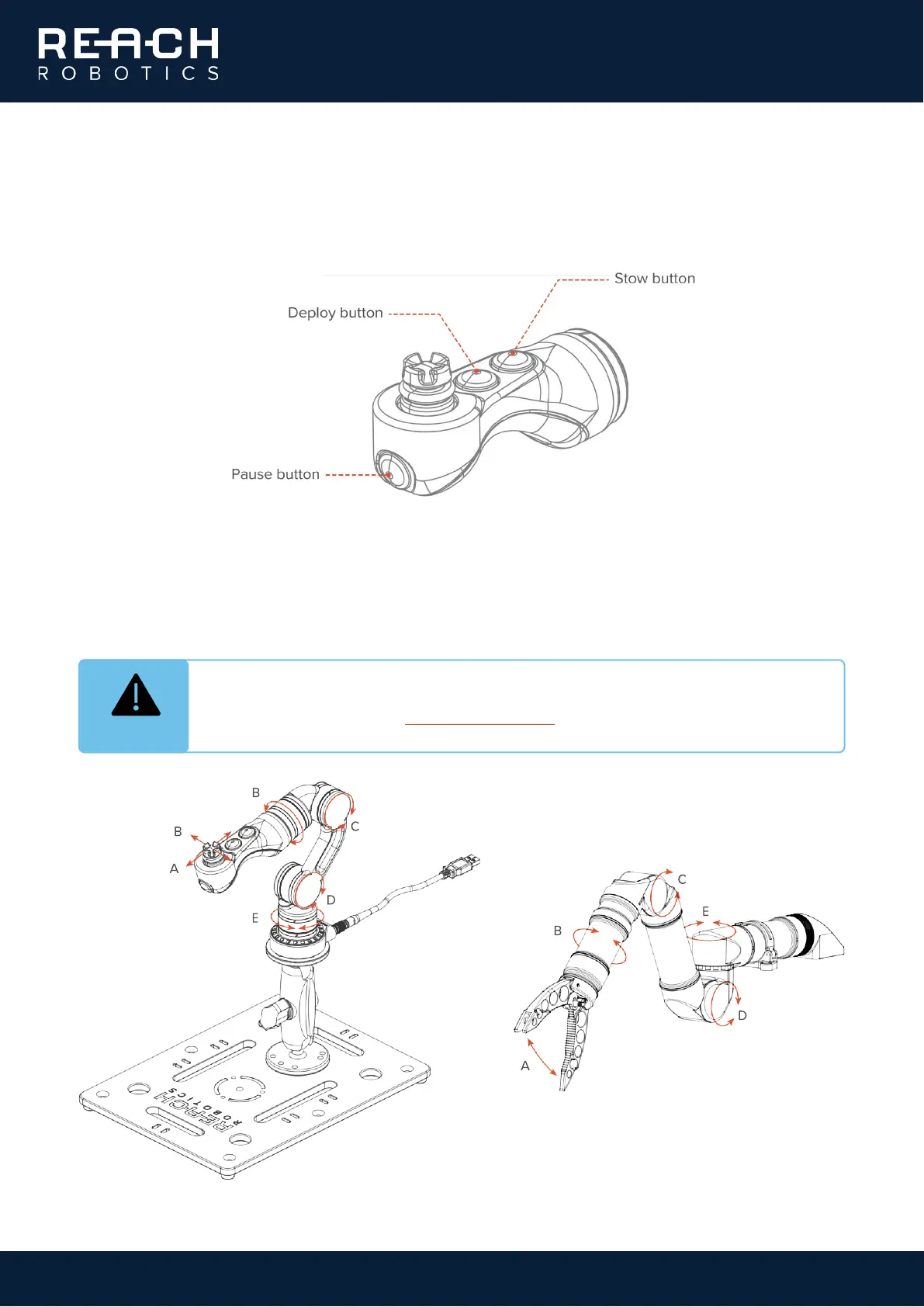
5. The Master Arm is now ready to control the manipulator. Making sure it is safe to do so, press the Master
Arm pause button to activate the controller. The flashing blue lights will become solid.
Double press the pause button to deactivate.
6. Move each Master Arm joint through its full range of motion. Check that:
a. The corresponding joint on the manipulator responds.
b. The joint moves in the correct direction.
c. The motion of controller to manipulator is a 1-to-1 ratio.
d. The motion is smooth and complete.
INFO
The B or “wrist” joint can be controlled by either the joystick or the rotate function of the
Master Arm handle. See the Reach Control manual
for more information.