CANopen Interface
30 CANBus Networking Manual V2.0 July 8, 2019
CANopen allows up to four TPDOs for any node ID. Unless otherwise specified in the
product datasheet, by default, TPDO1 to TPDO4 are used to transmit up to 8 user vari-
ables which may be loaded with any operating parameters using MicroBasic scripting.
Each of the 4 TPDO can be mapped with any mappable SDO query. For more details see
chapter PDO Mapping below.
Each of the 4 TPDOs can be configured to be sent at user-defined periodic intervals. This
is done using the CTPS parameter (See “CTPS - CANOpen TPDO Send Rate” in “Roboteq
Controllers User Manual v2.0”).
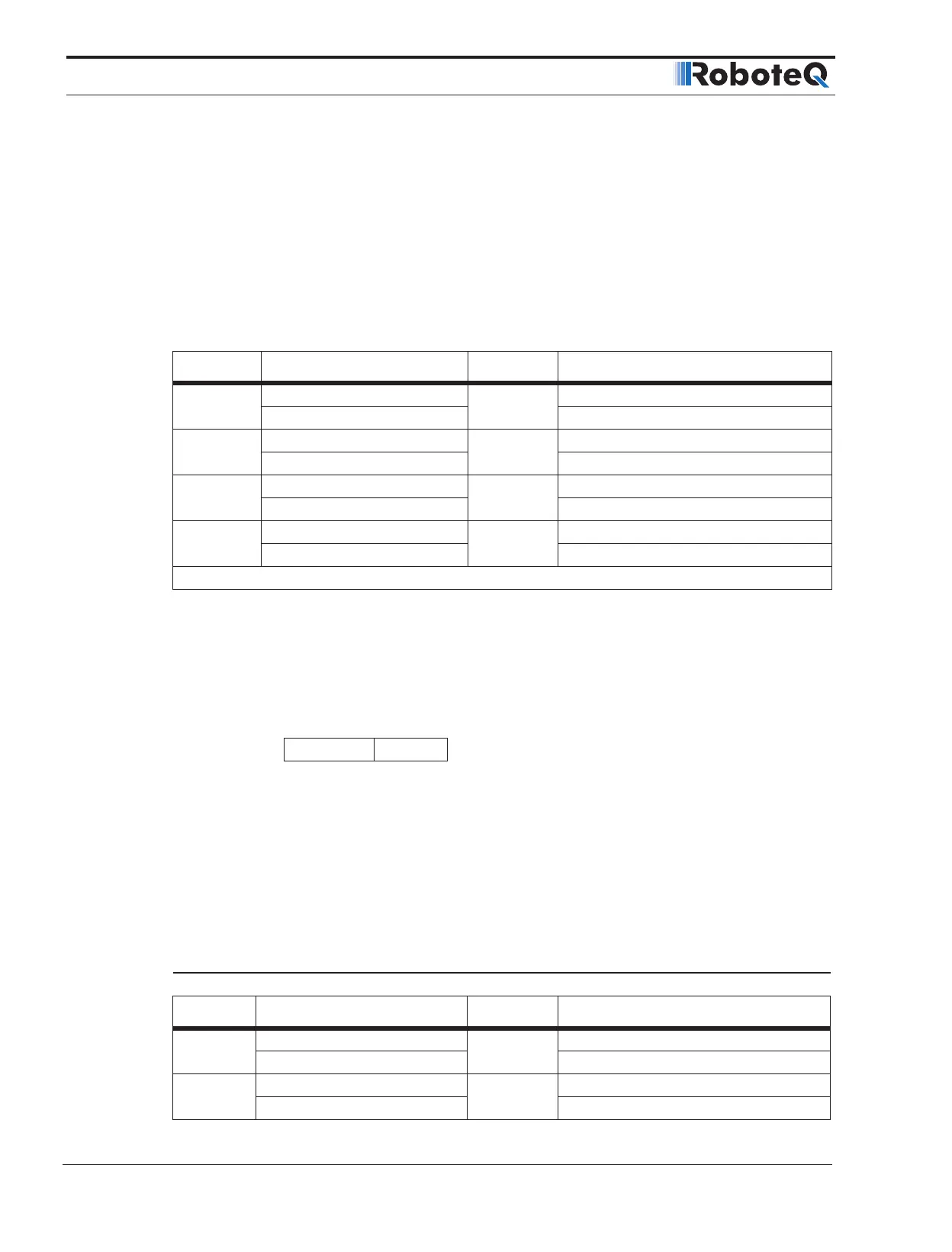
TABLE 3-1. Commands mapped on TPDOs
TPDO Object Index-Sub Size Default Object Mapped
TPDO1 0x2106-1 S32 User VAR 1
0x2106-2 User VAR 2
TPDO2 0x2106-3 S32 User VAR 3
0x2106-4 User VAR 4
TPDO3 0x2106-5 S32 User VAR 5
0x2106-6 User VAR 6
TPDO4 0x2106-7 S32 User VAR 7
0x2106-8 User VAR 8
S32: signed 32-bit word
Receive Process Data Object (RPDO) Messages
RPDOs are configured to capture runtime data destined to the controller.
RPDOs are CAN frames identified by their 11-bit header.
4 bits 7 bits
}
}
Object Type NodeID
RPDO1: 0x200 + Node ID
RPDO2: 0x300 + Node ID
RPDO3: 0x400 + Node ID
RPDO4: 0x500 + Node ID
Roboteq CANopen implementation supports RPDOs. Unless otherwise specified in the
product’s datasheet, by default, data received using RPDOs are stored in 8 user variables
from where they can be processed using MicroBasic scripting. Each of the 4 RPDO can
be mapped with any mappable SDO command. For more details see chapter PDO Map-
ping below.
TABLE 3-2. Commands mapped on RPDOs
RPDO Object Index-Sub Size Default Object Mapped
RPDO1 0x2005-9 S32 User VAR 9
0x2005-10 User VAR 10
RPDO2 0x2005-11 S32 User VAR 11
0x2005-12 User VAR 12
 Loading...
Loading...
