Object Dictionary
CANBus Networking Manual 33
(1)
Not supported in Roboteq controllers.
(2)
In Roboteq controllers, it behaves exactly like value 255.
First it is necessary to distinguish between synchronous and asynchronous PDOs:
Asynchronous PDOs are event-controlled and represent the normal transmission type of
PDOs. For this, the values 255 or 254 are to be entered as PDO type.
Synchronous PDOs are only transmitted after prior reception of a synchronization mes-
sage (Sync Object). PDO transmission is thus carried out synchronously in the entire net-
work, more or less at the same time. But what is much more important is that all device
inputs must be sampled on the arrival of the sync object, so that a uniform snapshot of
the process results. With the next sync-message, the recorded data are then sent in the
synchronous PDOs. Therefore, there is a delay here corresponding to the cycle time of
the Sync message, as the consumers receive the process variables at the time of the pre-
vious Sync message. In output direction the synchronous PDOs received by a node only
become valid on arrival of the next Sync message.
In order that the bus is not blocked up by a large number of synchronous PDOs, which
are all sent with every Sync message, the values 1-240 of the cyclic synchronous PDO
type are used as dividers for the transmission interval. Accordingly, [18xxsub02] = 4
means that the synchronous PDO is only sent with every fourth Sync message.
Object Dictionary
The CANopen dictionary shown in this section is subject to change. The CANopen EDS
file can be downloaded from the roboteq web site.
The Object Dictionary given in the table below contains the runtime queries and runtime
commands that can be accessed with SDO/PDO messages during controller operation.
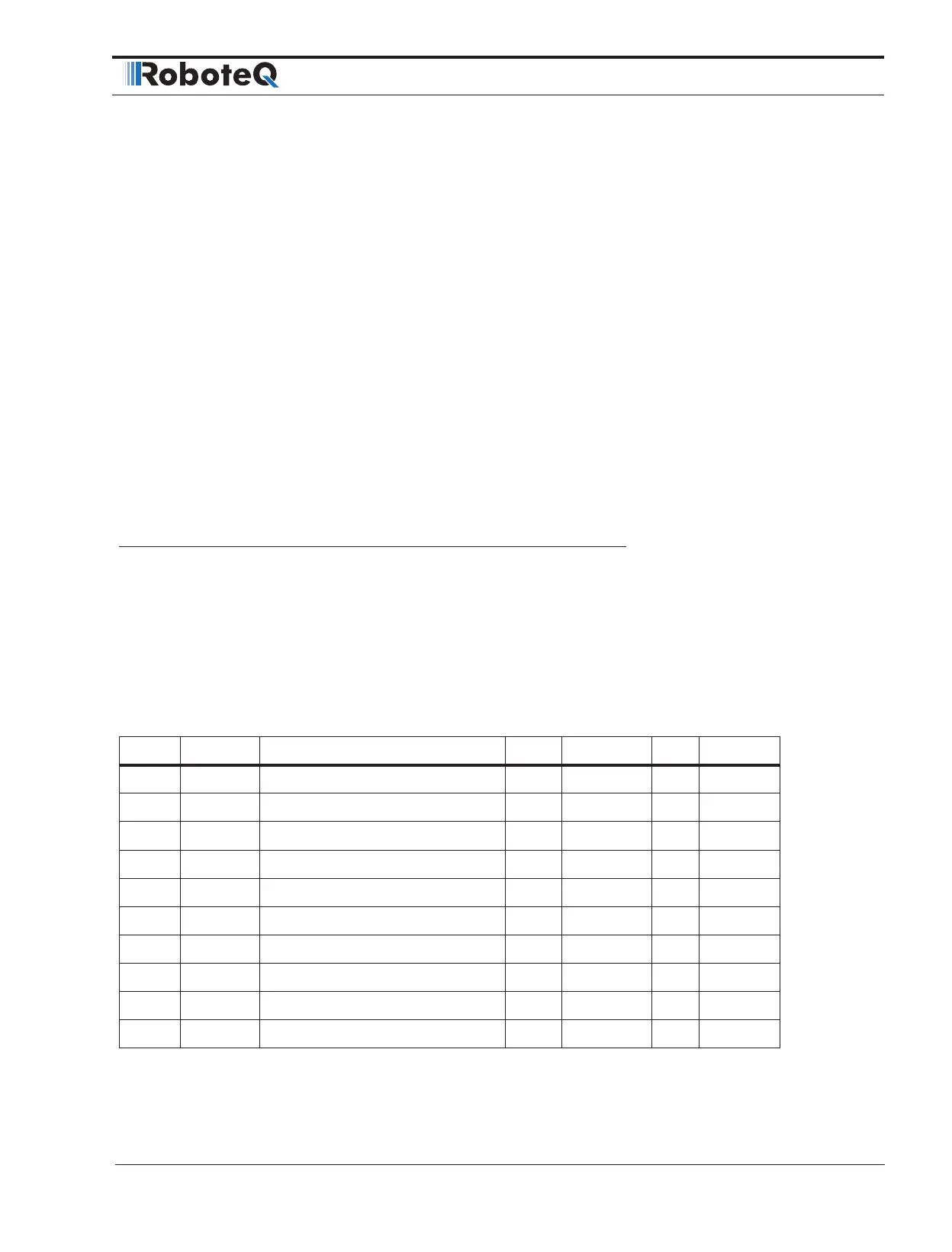
Communication Profile
Index Sub (hex) Entry Name Type Access PDO Command
0x1000 00 Device Type U32 RO No
0x1001 00 Error Register U8 RO No
0x1008 00 Manufacturer Device Name STR CONST No
0x1009 00 Manufacturer Hardware Version STR CONST No
0x100A 00 Manufacturer Software Version STR CONST No
0x100C 00 Guard Time U16 RW No
0x100D 00 Life Time Factor U8 RW No
0x1016 01-04 Consumer Heartbeat Time U32 RW No
0x1017 00 Producer Heartbeat Time U16 RW No
0x1018 01 Identity Object – Vendor ID U32 CONST No
 Loading...
Loading...
