CANopen Interface
40 CANBus Networking Manual V2.0 July 8, 2019
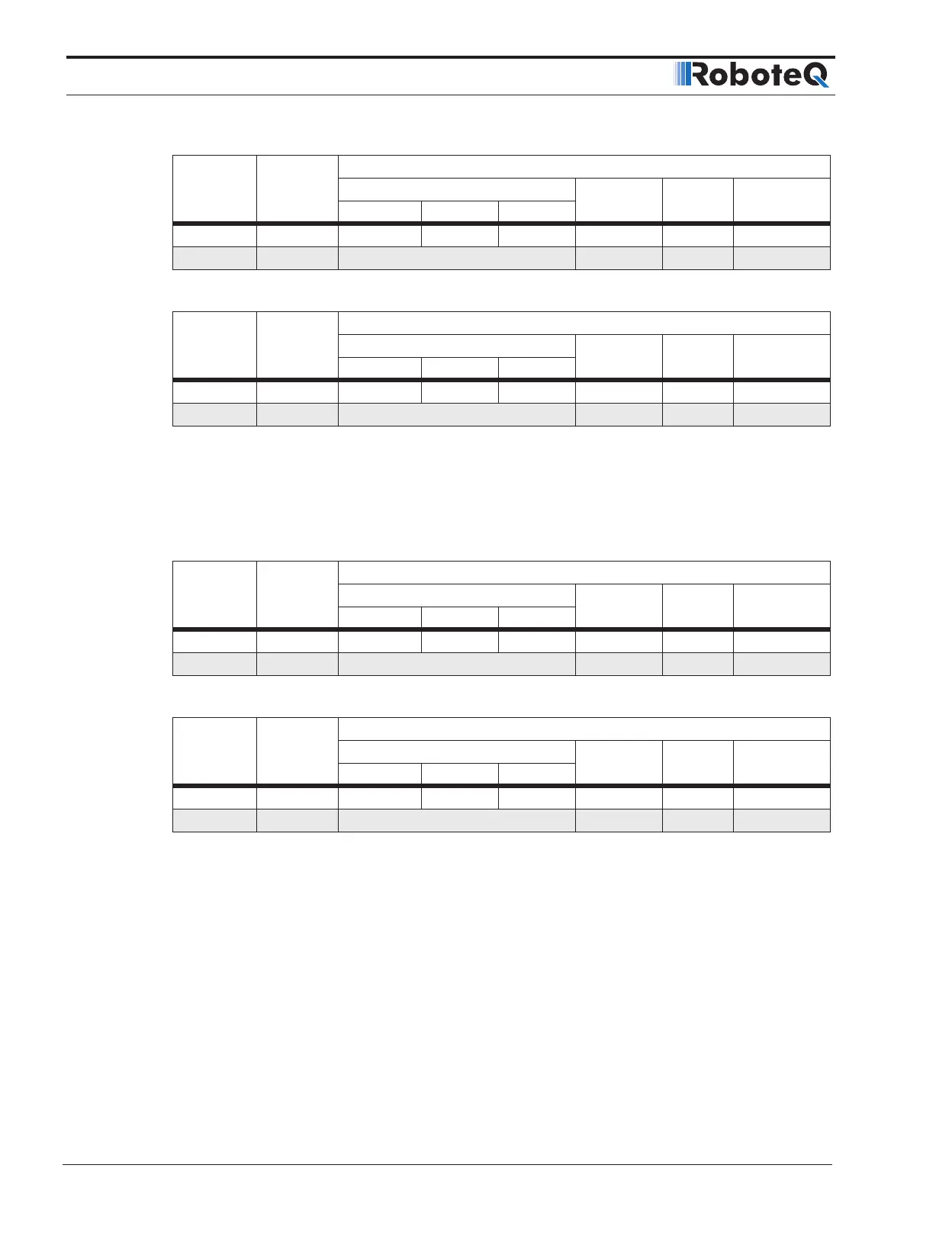
Header DLC
Payload
Byte0
Byte1-2 Byte 3 Bytes4-7bits 4-7 bits2-3 bits0-1
0x600+1 8 2 0 0 0x2003 0x02 0x0A
601h 8 20 03 20 02 0A 00 00 00
The respective response will be:
Header DLC
Payload
Byte0
Byte1-2 Byte 3 Bytes4-7bits 4-7 bits2-3 bits0-1
0x580+1 8 6 0 0 0x2003 0x02 0x00
581h 8 60 03 20 02 00 00 00 00
SDO Example 2: Activate emergency shutdown (EX) for node 12
• nd = 12, since the destination’s node id is 12.
• ccs = 2, since it is a command.
• n = 3 since only one byte of the data is used (unsigned8).
• index = 0x200C and subindex = 0x00 according to object dictionary.
Header DLC
Payload
Byte0
Byte1-2 Byte 3 Bytes4-7bits 4-7 bits2-3 bits0-1
0x600+12 8 2 3 0 0x200C 0x00 0x01
601Ch 8 2C 0C 20 00 01 00 00 00
The respective response will be:
Header DLC
Payload
Byte0
Byte1-2 Byte 3 Bytes4-7bits 4-7 bits2-3 bits0-1
0x580+1 8 6 0 0 0x200C 0x00 0x00
58Ch 8 60 0C 20 00 00 00 00 00
SDO Example 3: Read Battery Volts (V) of node 1.
• nd = 1, since the destination’s node id is 1.
• ccs = 4, since it is a query.
• n = 2 since 2 bytes of the data are used (unsigned16).
• index = 0x210D and subindex = 0x02 according to object dictionary.
 Loading...
Loading...
