SDO Construction Details
CANBus Networking Manual 41
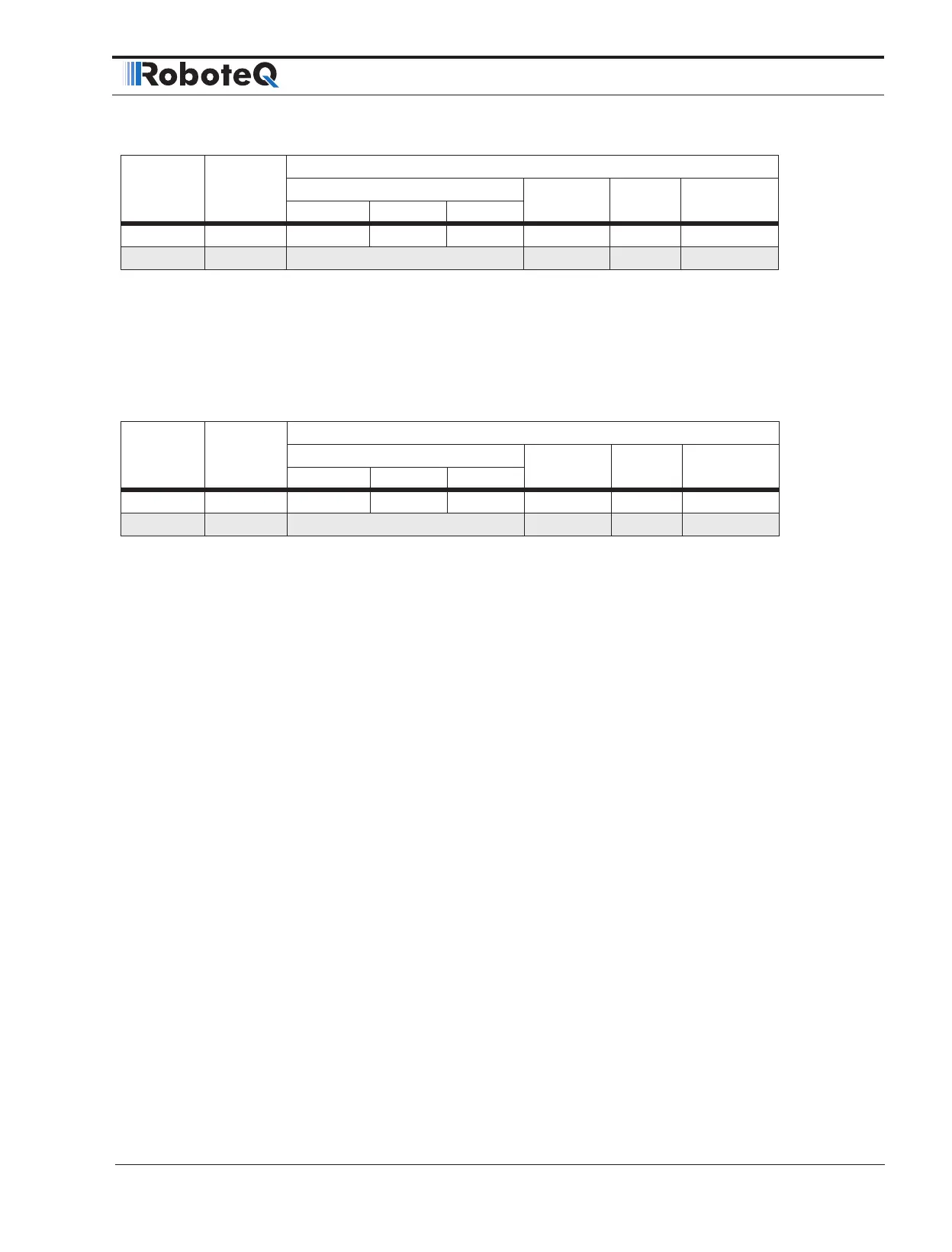
Header DLC
Payload
Byte0
Byte1-2 Byte 3 Bytes4-7bits 4-7 bits2-3 bits0-1
0x600+1 8 4 2 0 0x210D 0x02 0x00
601h 8 48 0D 21 02 0A 00 00 00
The respective response will be:
• nd = 1, since the source node id is 1.
• ccs = 4, since it is a query response.
• n = 2 since 2 bytes of the data are used (unsigned16).
• index = 0x210D and subindex = 0x02 according to object dictionary.
• data = 0x190 = 400 = 40 Volts.
Header DLC
Payload
Byte0
Byte1-2 Byte 3 Bytes4-7bits 4-7 bits2-3 bits0-1
0x580+1 8 4 2 xx 0x210D 0x02 0x190
581h 8 48 0D 21 02 90 01 00 00
 Loading...
Loading...
