CANBus Networking Manual 45
Implementation
Supported SDOs
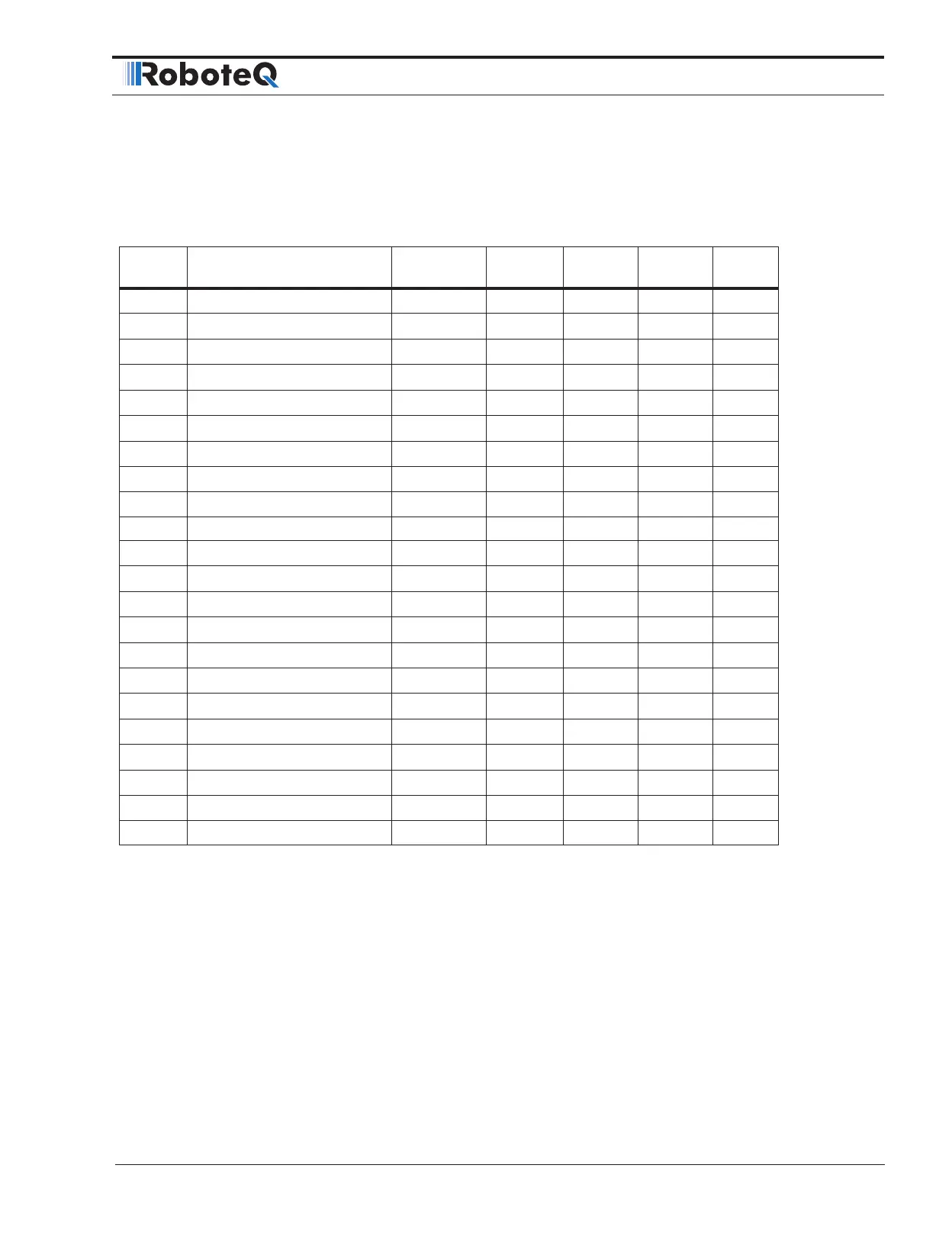
Table 4-2 shows the SDOs described in DS402 standard and supported by Roboteq Motor
Controllers.
TABLE 4-2. Supported SDO
Object Description
Roboteq
Command
Profile
Position Velocity
Profile
Velocity
Torque
Profile
6040
00
Control Word CW
6041
00
Status Word SW
6042
00
Target velocity (vl) S
6043
00
vl velocity demand RMP
6044
00
vl velocity actual value F
6046
XX
vl velocity min max amount SPL
6048
XX
vl velocity acceleration SAC
6049
XX
vl velocity deceleration SDC
6060
00
Modes of Operation ROM
6061
00
Modes of Operation Display AOM
6064
00
Position actual value F
606C
00
Velocity actual value F
6071
00
Target torque TC
6077
00
Torque actual value A
607A
00
Target position POS
6081
00
Profile velocity PSP
6083
00
Profile acceleration PAC
6084
00
Profile deceleration PDC
6087
00
Torque slope TSL
60FF
00
Target velocity (pv) S
6502
00
Supported Drive Modes SDM
67FE
00
Version Number VNM
PDS FSA
The standard requires the implementation of a specific finite state machine called FSA.
The FSA is designed not only to react to CANOpen commands (Controlword and Sta-
tusword), but also to local commands (in this case the use of CW command and SW
query). For backward compatibility reasons, the FSA is not active by default. It can be acti-
vated by using a special configuration command (^FSA 1, see Figure 4-1).
 Loading...
Loading...
