CAN Networking on Roboteq Controllers
52 CANBus Networking Manual V2.0 July 8, 2019
0x6046 - VL Velocity Min Max Amount
Table 4-23 gives a short description of the object.
TABLE 4-23. Velocity Min Max Amount
Sub-Index 01 Optional N Type U32 Access RW PDO R
Value Range Default 0
RoboCommand SPL
Description VL velocity min amount.
Sub-Index 02 Optional N Type U32 Access RW PDO R
Value Range Default 1000
RoboCommand SPL
Description VL velocity max amount.
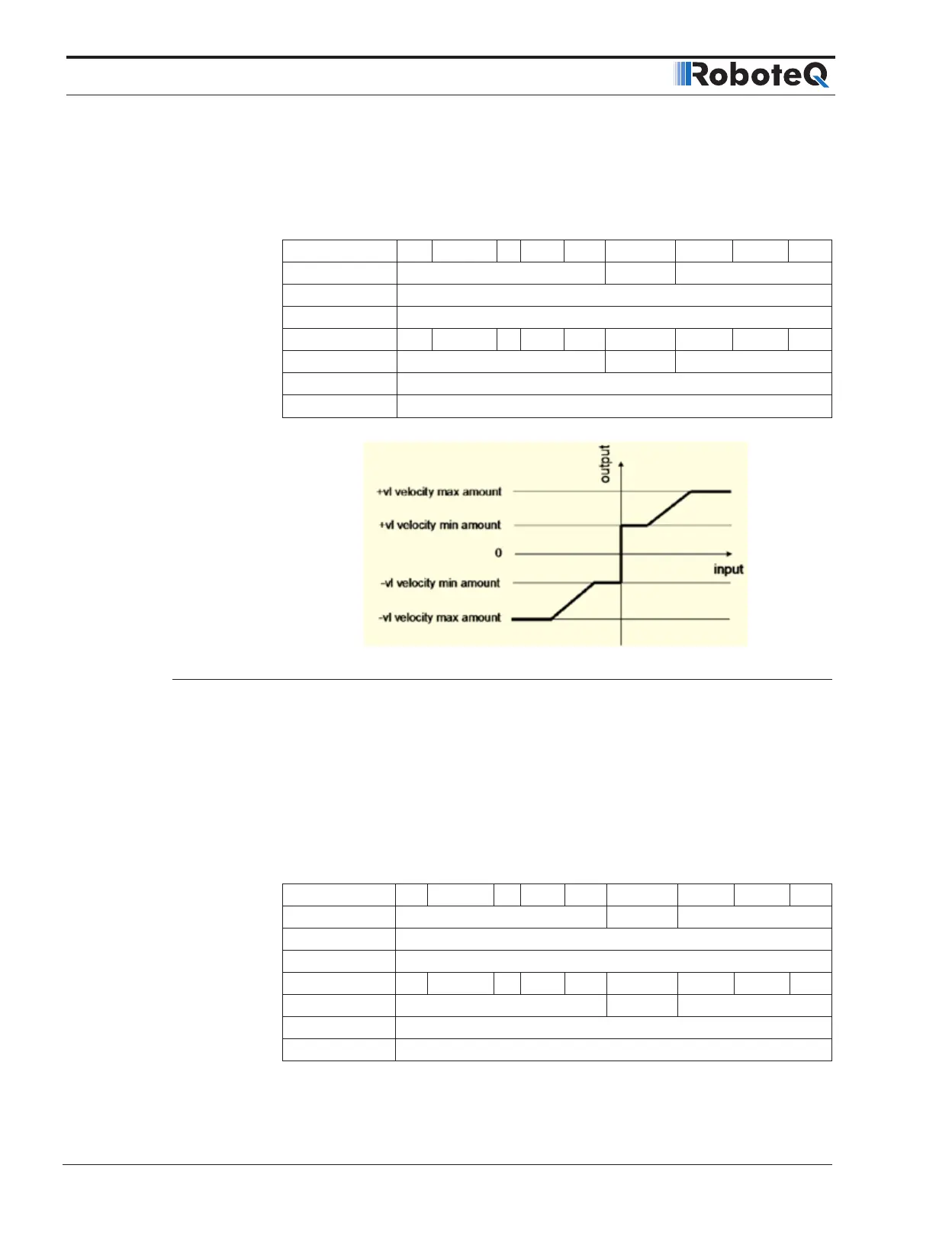
Figure 4-3. Velocity Min Max Amount
This object shall indicate the configured minimum and maximum amount of velocity in
RPM. The vl velocity max amount sub-object shall be mapped internally to the vl velocity
max positive and vl velocity max negative values. The vl velocity min amount sub-object
shall be mapped internally to the vl velocity min positive and vl velocity min negative val-
ues. as shown Figure 4-3.
0x6048 - VL Velocity Acceleration
Table 4-24 gives a short description of the object.
TABLE 4-24. Velocity Acceleration
Sub-Index 01 Optional N Type U32 Access RW PDO R
Value Range Default MAC(20000)
RoboCommand SAC
Description Delta speed in RPM*10.
Sub-Index 02 Optional N Type U16 Access RW PDO R
Value Range Default 1
RoboCommand SAC
Description Delta time in seconds.
 Loading...
Loading...
