CANBus Networking Manual 53
SDO Description
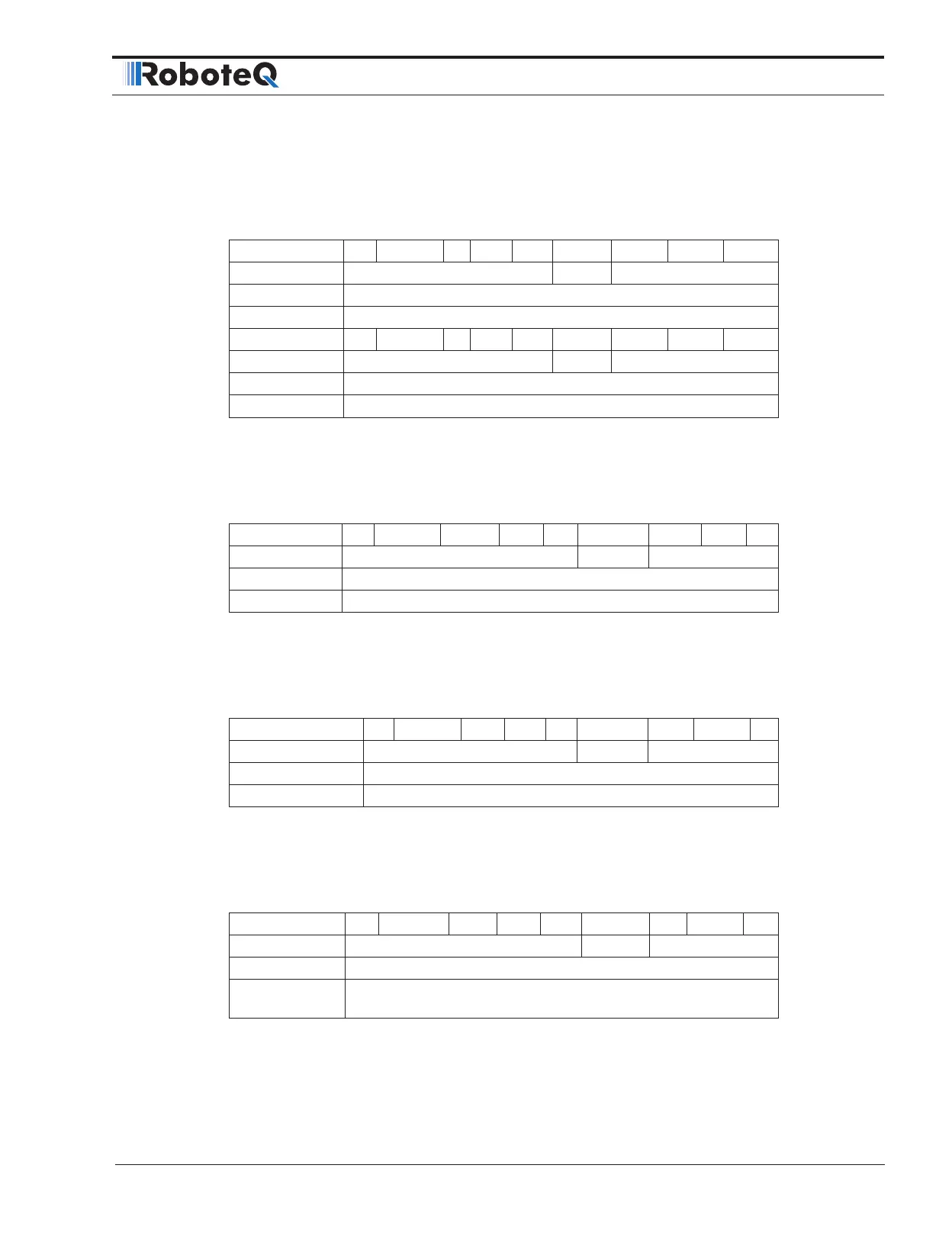
0x6049 - VL Velocity Deceleration
Table 4-25 gives a short description of the object.
TABLE 4-25. Velocity Deceleration
Sub-Index 01 Optional N Type U32 Access RW PDO R
Value Range Default MDEC(20000)
RoboCommand SDC
Description Delta speed in RPM*10.
Sub-Index 02 Optional N Type U16 Access RW PDO R
Value Range Default 1
RoboCommand SDC
Description Delta time in seconds.
0x6060 - Modes of Operation
Table 4-22 gives a short description of the object and Table 1shows the available modes.
TABLE 4-26. Modes of Operation
Sub-Index 00 Optional CND Type S8 Access RW PDO R
Value Range Default MMOD(0)
RoboCommand ROM
Description The requested operation mode.
0x6061 - Modes of Operation Display
Table 4-27 gives a short description of the object and Table 1 shows the available modes.
TABLE 4-27. Modes of Operation Display
Sub-Index 00 Optional CND Type S8 Access RO PDO
Value Range Default MMOD(0)
RoboCommand AOM
Description The actual operation mode.
0x6064 - Position Actual Value (PP)
Table 4-28 gives a short description of the object.
TABLE 4-28. Position Actual Value
Sub-Index 00 Optional CND Type S32 Access RO PDO T
Value Range Default
RoboCommand F
Description This object shall provide the actual value of the position measure-
ment device.
The position unit are in sensor counts in Closed Loop Count Position mode. In Closed
Loop Position Relative mode and in Closed Loop Tracking Position mode the position unit
is in range -1000 to 1000 scaled by the minimum and maximum sensor value.
 Loading...
Loading...
