CAN Networking on Roboteq Controllers
44 CANBus Networking Manual V2.0 July 8, 2019
The standard describes all the required SDOs, as long as the actions the motor controller
should take upon receiving these SDOs. Additionally the standard describes a Finite State
Machine (FSA) which should run on motor controller.
Implementation
The implementation has been directed under standard version 4.1.0.
Index Range & Channel Selection
All the SDOs described in DS402 standard range from index 0x600 - 0x67FF. However
these are only for controlling one motor channel. For multi channel controllers the control-
ler should be able to accept index ranges for the other channels as well. These index rang-
es are shifted ranges of the abovementioned one as shown below:
• 0x6000 - 0x67FF, for channel 1.
• 0x6800 - 0x6FFF, for channel 2.
• 0x7000 - 0x77FF, for channel 3.
There are Roboteq motor controllers with up to three channels available.
Modes of Operation
Roboteq Controllers support the following operation Modes:
A. Open Loop
B. Closed Loop Speed, controls Speed using Speed as feedback.
C. Closed Loop Speed Position, controls Speed using Position as feedback.
D. Closed Loop Count Position, controls Position.
E. Closed Loop Position Relative, controls Position within specific boundaries.
F. Closed Loop Position Tracking, controls Position within specific boundaries, with
abrupt transition.
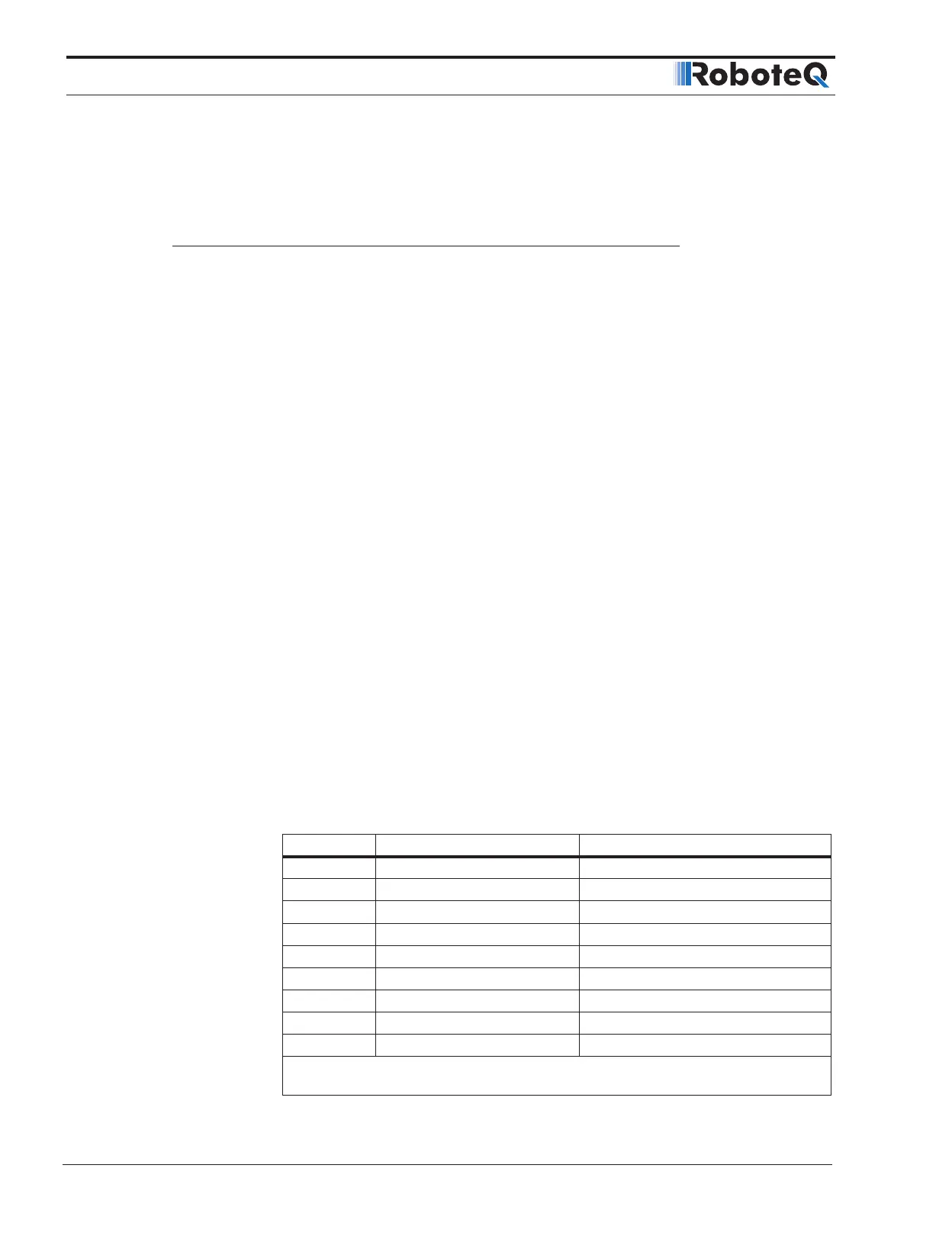
In order to conform the above operation modes to the operation modes described, the
DS402 modes of operation supported by Roboteq are shown in Table 4-1 - Operation Table 1.
Any other mode described in DS402 standard is not supported by Roboteq controllers.
TABLE 4-1. Operation Modes
Value Definition Roboteq Operation Mode
-4¹ Velocity Mode Closed Loop Speed Position
-3
1
Profile Velocity Mode Closed Loop Speed Position
-2
1
Profile Position Mode Closed Loop Position Tracking Mode²
-1
1
Profile Position Mode Closed Loop Position Relative Mode
2
0 No Mode Open Loop Mode
1 Profile Position Mode Closed Loop Count Position Mode
2 Velocity Mode Closed Loop Speed Mode
3 Profile Velocity Mode Closed Loop Speed Mode
4 Torque Profile Mode Closed Loop torque Mode
¹Roboteq Specific Modes
2
Not all Profile Position features can be supported with this mode.
 Loading...
Loading...
