CANopen Interface
34 CANBus Networking Manual V2.0 July 8, 2019
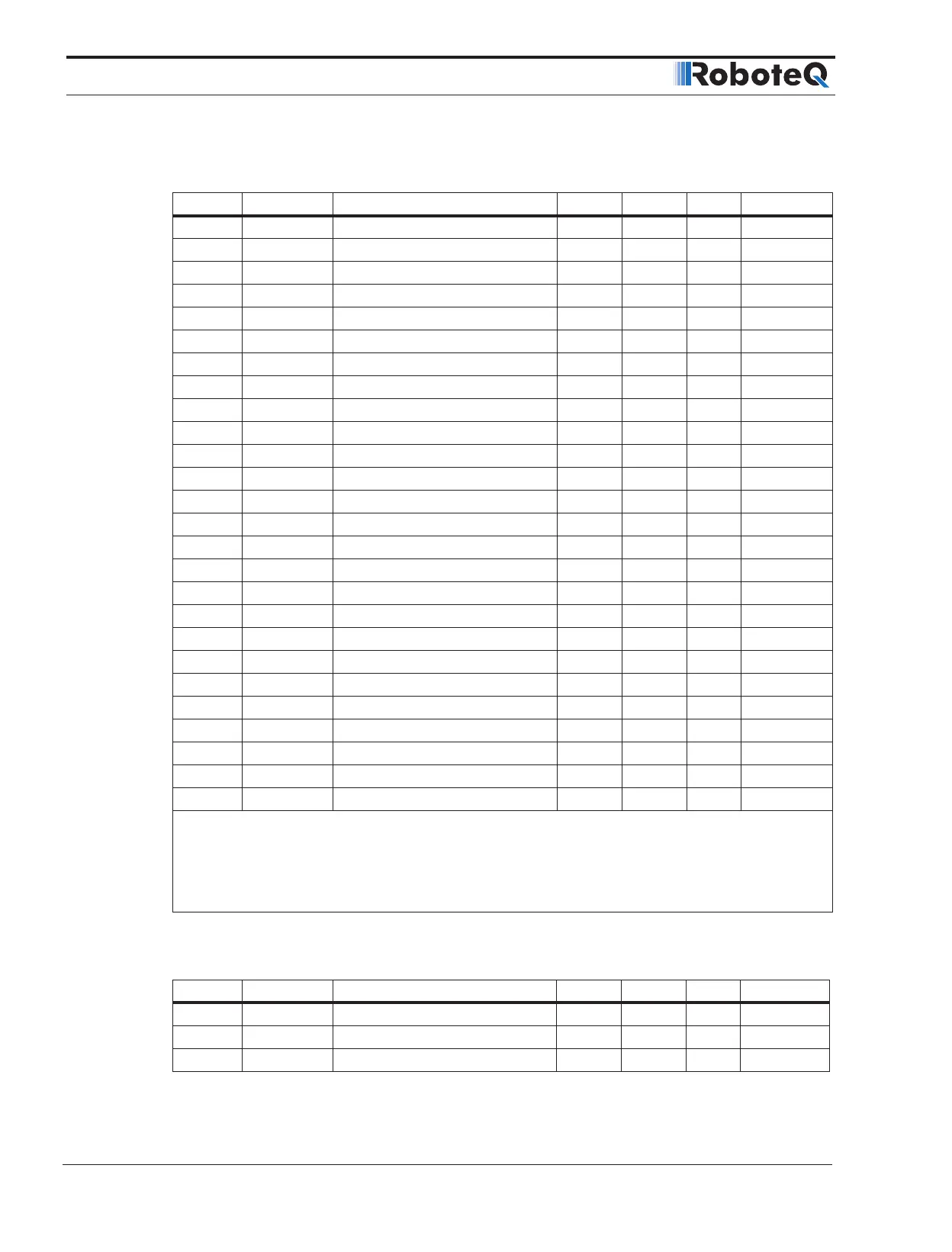
Runtime Commands
Index Sub (hex) Entry Name Type Access PDO Command
0x2000 01-mm
(1)
Set Motor Command S32 WO Yes CANGO
0x2001 01-mm
(1)
Set Position S32 WO Yes P
0x2002 01-mm
(1)
Set Velocity S16 WO Yes S
0x2003 01-ee
(2)
Set Encoder Counter S32 WO Yes C
0x2004 01-mm
(1)
Set Brushless Counter S32 WO Yes CB
0x2005 01-vv
(3)
Set User Integer Variable S32 WO Yes VAR
0x2006 01-mm
(1)
Set Acceleration S32 WO Yes AC
0x2007 01-mm
(1)
Set Deceleration S32 WO Yes DC
0x2008 00 Set All Digital Out bits U8 WO Yes DS
0x2009 00 Set Individual Digital Out bits U8 WO Yes D1
0x200A 00 Reset Individual Digital Out bits U8 WO Yes D0
0x200B 01-ee
(2)
Load Home Counter U8 WO Yes H
0x200C 00 Emergency Shutdown U8 WO Yes EX
0x200D 00 Release Shutdown U8 WO Yes MG
0x200E 00 Stop in all modes U8 WO Yes MS
0x200F 01-mm
(1)
Set Pos Relative S32 WO Yes PR
0x2010 01-mm
(1)
Set Next Pos Absolute S32 WO Yes PX
0x2011 01-mm
(1)
Set Next Pos Relative S32 WO Yes PRX
0x2012 01-mm
(1)
Set Next Acceleration S32 WO Yes AX
0x2013 01-mm
(1)
Set Next Deceleration S32 WO Yes DX
0x2014 01-mm
(1)
Set Next Velocity S32 WO Yes SX
0x2015 01-bb
(4)
Set User Boolean Variable U32 WO Yes B
0x2016 01-rr
(5)
Set RC Pulse Out S32 WO Yes RS
0x2017 00 Save Config to Flash U8 WO Yes EES
0x2018 00 Run MicroBasic Script U8 WO Yes R
0x201F 01-si
(6)
Set Absolute SSI Counter S32 WO Yes CSS
(1) mm: Maximum number of motors.
(2) ee: Maximum number of encoders.
(3) vv: Maximum number of integer variables.
(4) bb: Maximum number of boolean variables.
(5) rr: Maximum number of RC pulse output.
(6) si: Maximum number of SSI encoders.
Runtime Queries
Index Sub (hex) Entry Name Type Access PDO Command
0x2100 01-mm(1) Read Motor Amps S16 RO Ye s A
0x2101 01-mm(1) Read Actual Motor Command S16 RO Ye s M
0x2102 01-mm(1) Read Applied Power Level S16 RO Ye s P
 Loading...
Loading...
