CAN Networking on Roboteq Controllers
54 CANBus Networking Manual V2.0 July 8, 2019
0x606C - Velocity Actual Value (PV)
Table 4-29 gives a short description of the object.
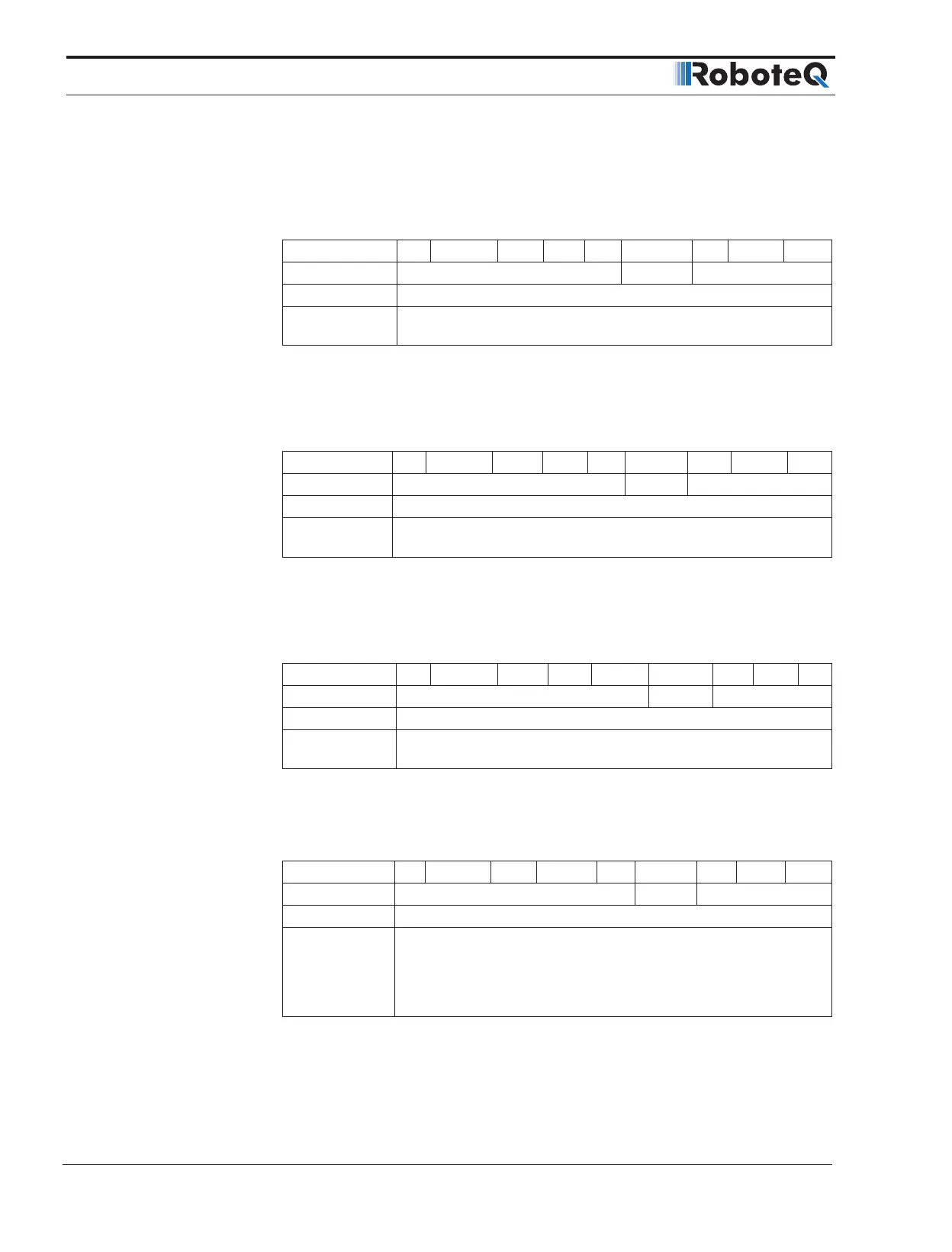
TABLE 4-29. Velocity Actual Value
Sub-Index 00 Optional CND Type S32 Access RO PDO T
Value Range Default
RoboCommand F
Description This object shall provide the actual velocity value, in RPM, derived
either from the velocity sensor or the position sensor.
0x6071 - Target Torque (TQ)
Table 4-30 gives a short description of the object.
TABLE 4-30. Target Torque
Sub-Index 00 Optional CND Type S16 Access RW PDO R
Value Range Default 0
RoboCommand TC
Description This object shall indicate the configured input value, in Nm*100, for
the torque controller in profile torque mode.
0x6077 - Torque Actual Value (TQ)
Table 4-31 gives a short description of the object.
TABLE 4-31. Torque Actual Value
Sub-Index 00 Optional CND Type S16 Access RO PDO T
Value Range Default
RoboCommand TRQ
Description This object shall provide the actual value of the torque, in Nm*100. It
shall correspond to the instantaneous torque in the motor.
0x607A - Target Position (PP)
Table 4-32 gives a short description of the object.
TABLE 4-32. Target Position
Sub-Index 00 Optional CND Type S32 Access RW PDO R
Value Range Default 0
RoboCommand POS
Description The commanded position that the drive should move to in position
profile mode using the current settings of motion control parameters
such as velocity, acceleration, deceleration, motion profile type etc.
The value of this object shall be interpreted as absolute or relative de-
pending on the abs/rel flag in the ControlWord.
The position unit are in sensor counts in Closed Loop Count Position mode. In Closed
Loop Position Relative mode and in Closed Loop Tracking Position mode the position unit
is in range -1000 to 1000 scaled by the minimum and maximum sensor value.
 Loading...
Loading...
