Robotiq inc. © 2008 - 2014 41
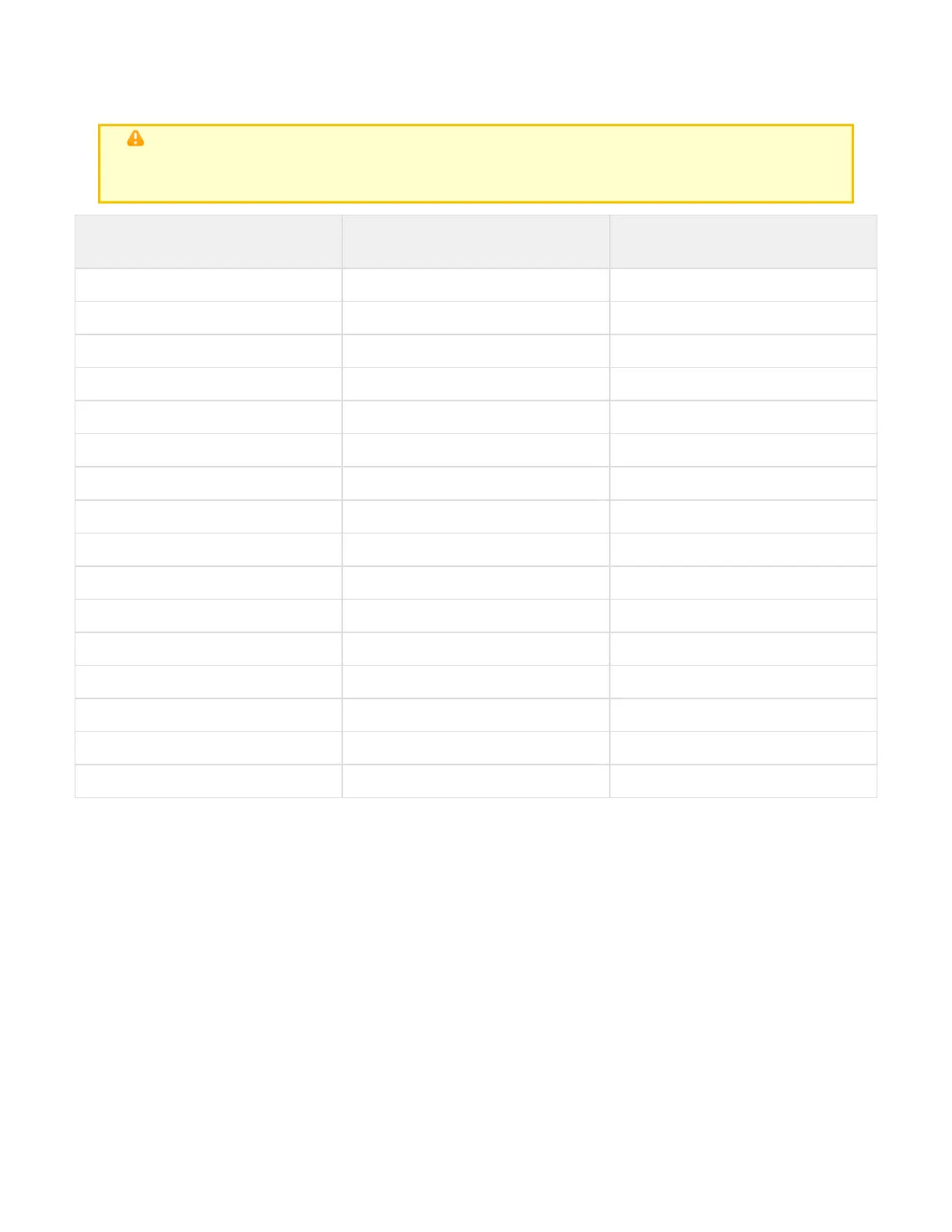
REGISTER ROBOT OUTPUT /
FUNCTIONALITIES
ROBOT INPUT / STATUS
Byte 0 ACTION REQUEST GRIPPER STATUS
Byte 1 00 OBJECT DETECTION
Byte 2 00 FAULT STATUS
Byte 3 POSITION REQUEST POS. REQUEST ECHO
Byte 4 SPEED FINGER A POSITION
Byte 5 FORCE FINGER A CURRENT
Byte 6 00 NOT USED IN SIMPLE MODE
Byte 7 00 FINGER B POSITION
Byte 8 00 FINGER B CURRENT
Byte 9 00 NOT USED IN SIMPLE MODE
Byte 10 00 FINGER C POSITION
Byte 11 00 FINGER C CURRENT
Byte 12 00 NOT USED IN SIMPLE MODE
Byte 13 00 SCISSOR POSITION
Byte 14 00 SCISSOR CURRENT
Byte 15 RESERVED RESERVED