Robotiq 3-Finger Adaptive Robot Gripper Instruction Manual
Robotiq inc. © 2008 - 2014 28
Real-time Ethernet communication protocol
Real-time Ethernet communication includes Ethernet/IP, EtherCAT, PROFINET and Modbus TCP/IP protocols.
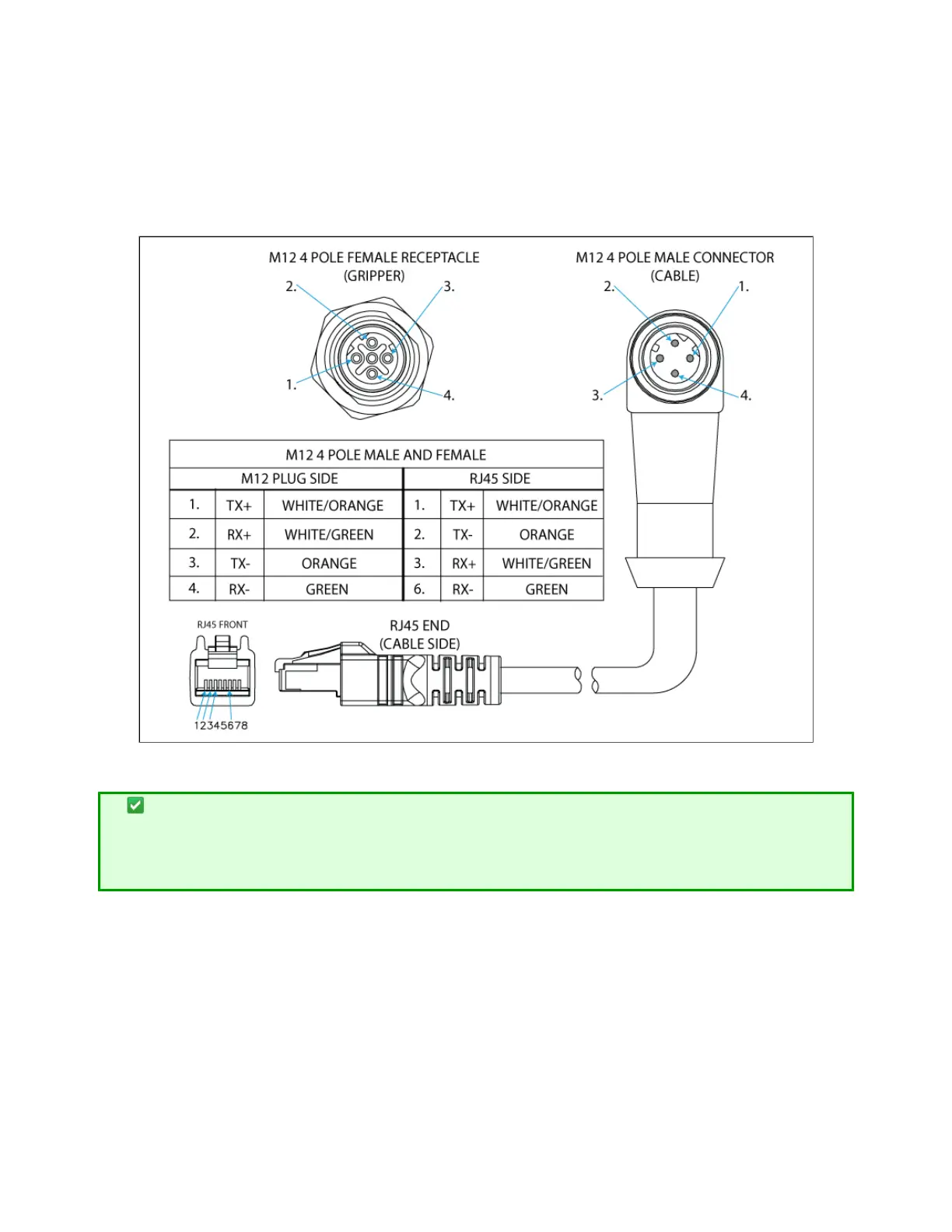
See the Real-Time Ethernet pin-out diagram below (Figure 3.5.2.5) for the receptacle (female) present on the
3-Finger Adaptive Robot Gripper and the cable (male) provided with your Gripper.
Figure 3.5.2.5 : Real-time Ethernet communication pin-out.
Tip
The 3-Finger Adaptive Robot Gripper features an auto-crossover, so there is no need to cross
the RX/TX signals.
Factory settings for each Ethernet protocols: