Robotiq inc. © 2008 - 2014 46
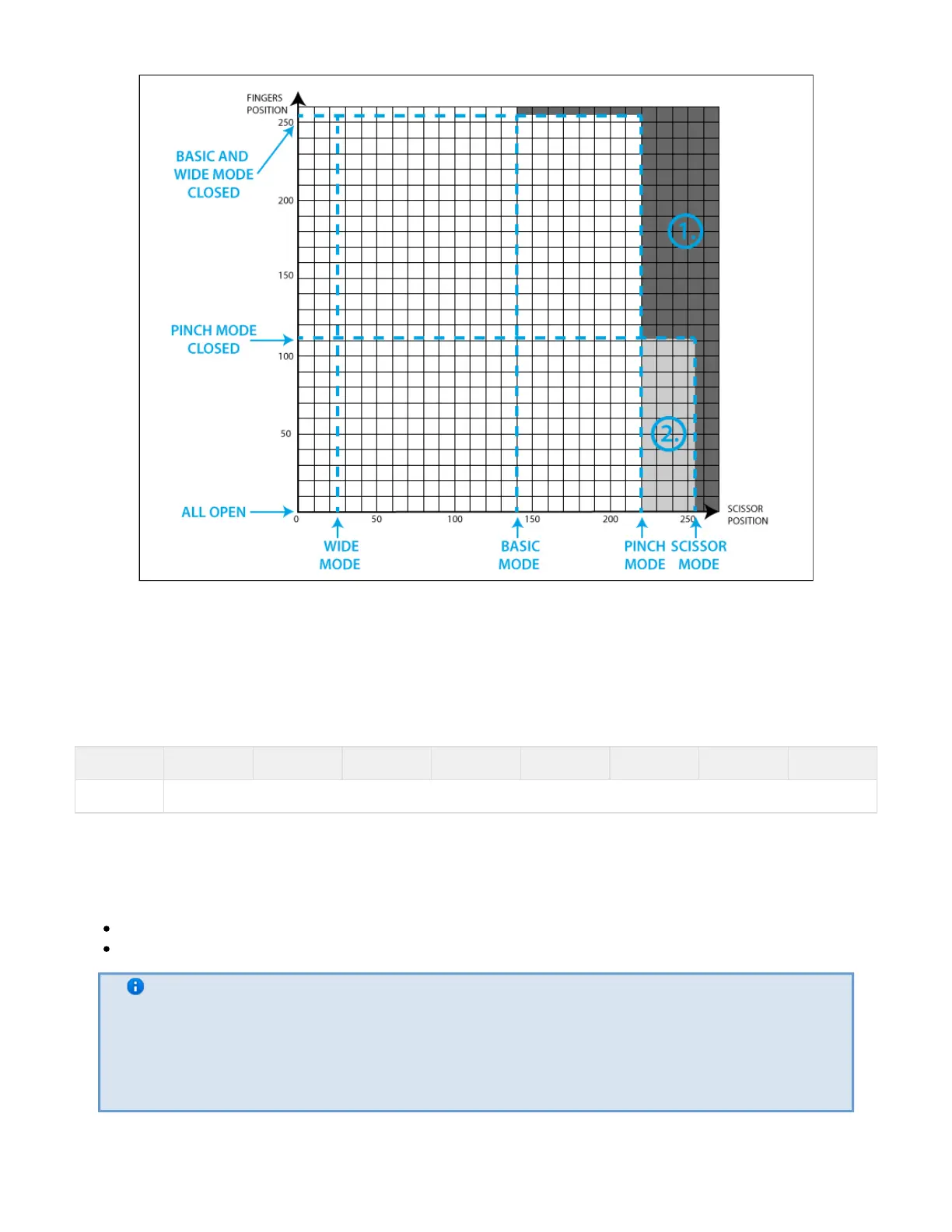
Figure 4.4.1 : Reachable workspace of the fingers and scissor axis, zone 1 is never reachable, zone 2 is only
reachable in individual control of Scissor Mode.
Register: SPEED (FINGER A IN INDIVIDUAL MODE)
Address: Byte 4
Bits 7 6 5 4 3 2 1 0
Symbols
rSPA
This register is used to set the Gripper closing or opening speed (or Finger A only if bit is set) in real time,rICF
however, setting a speed will not initiate a motion.
rSPA
0x00 minimum speed
0xFF maximum speed