Robotiq inc. © 2008 - 2014 6
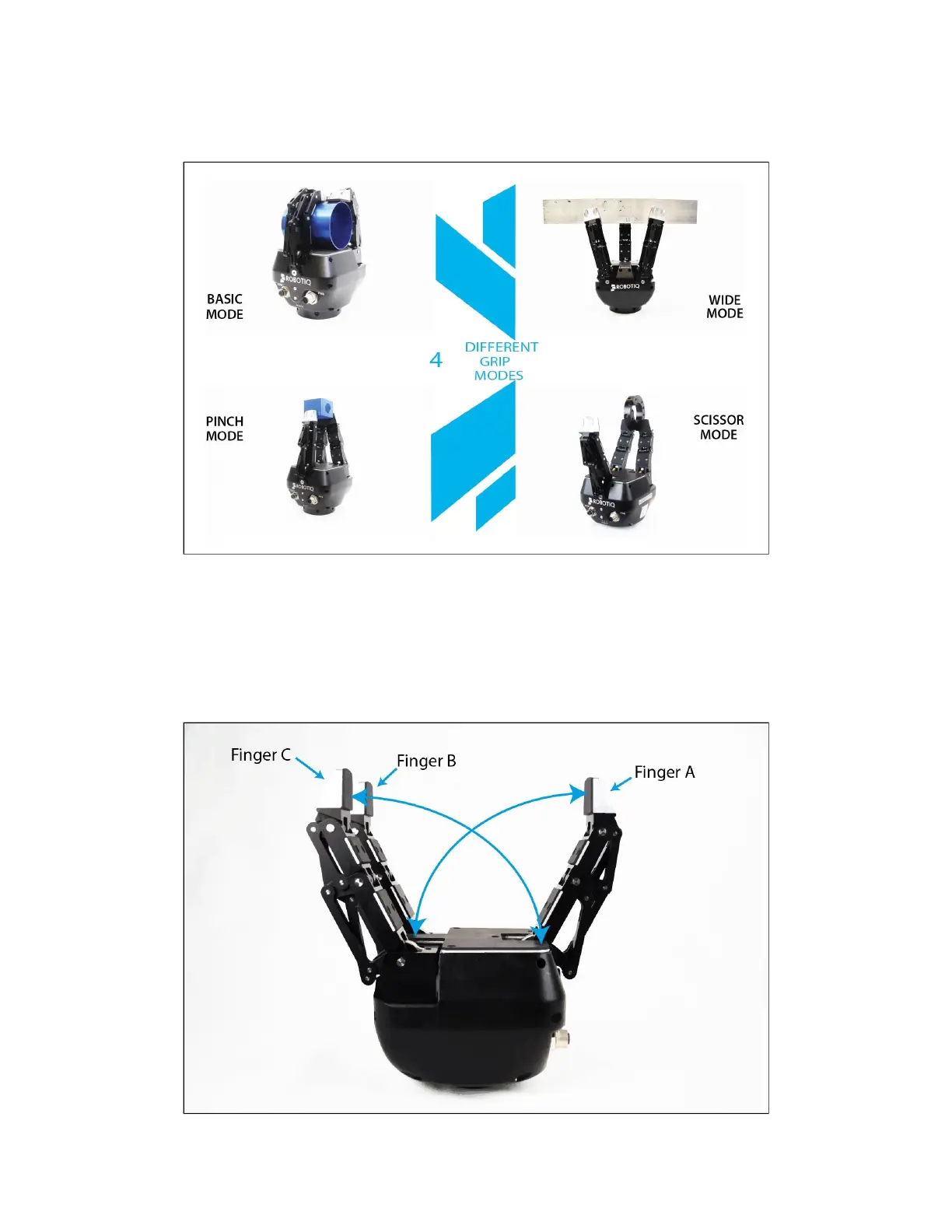
The four pre-set Operation Modes can be chosen by the user (see Figure 1.3).
Figure 1.3 : The four Operation Modes of the 3-Finger Adaptive Robot Gripper.
The second movement of the Gripper is the closing and opening of the fingers as shown in Figure 1.4. This action is
performed with a single input from the user. Each finger is not controlled independently; the Gripper itself closes
each finger until it reaches a stable configuration, on an object or against the Gripper palm. Note that a user can
specify the relative speed at which the fingers will close and the relative force that will be applied to an object.
Figure 1.4 : Second movement of the 3-Finger Adaptive Robot Gripper: closing and opening the fingers.