Robotiq Hand-E Gripper Instruction Manual
OPEN Component
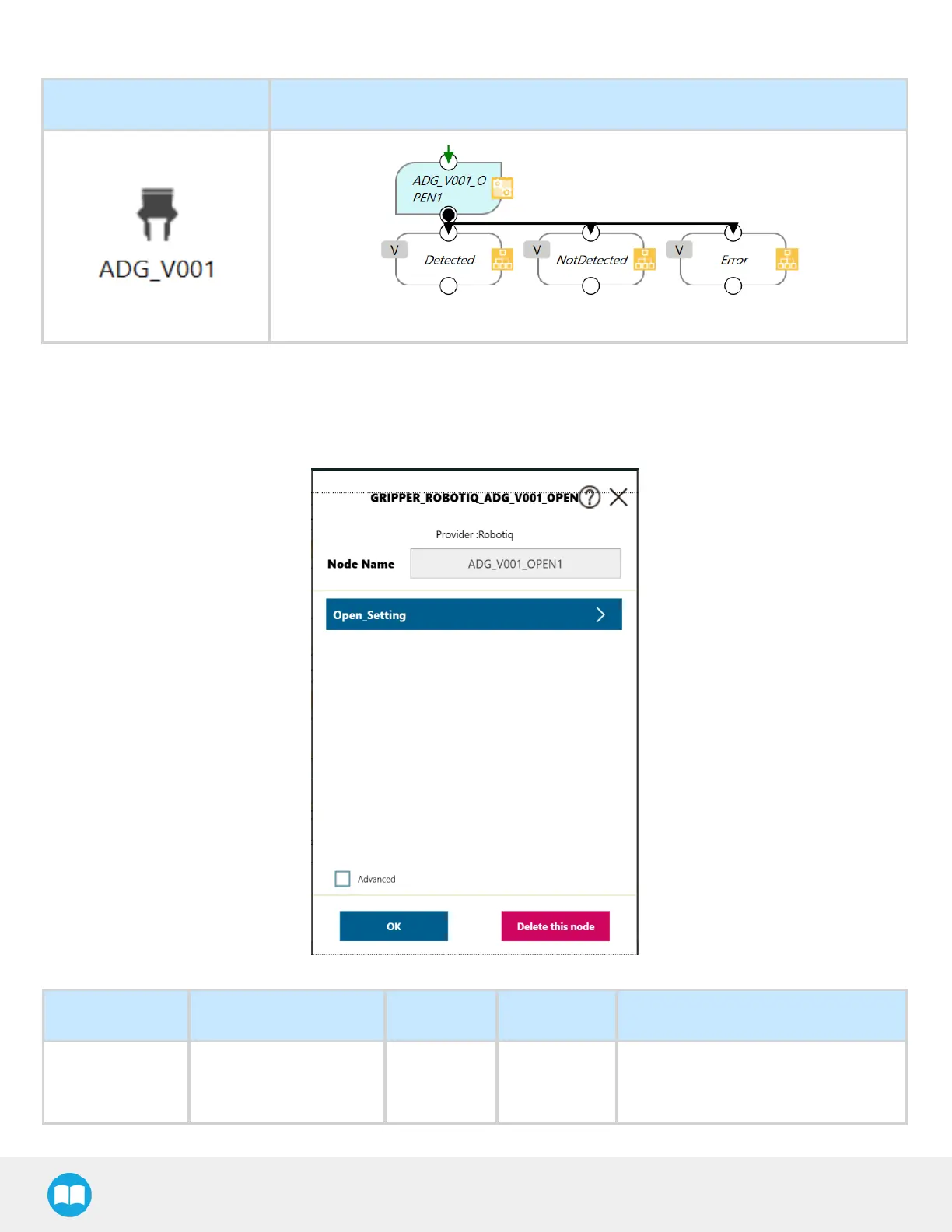
Component Icon Component Node
1
Drag and drop the OPENComponent icon after a program Gateway to place a OPENprogram node
(ADG_V001_OPEN)
2
Tap the OPENnode to highlight it and click on the pencil to edit the settings
Fig. 4-5: OPENNode Settings Menu
Setting Variable Type Default Description
Open_Setting
(SETNode)
var_wait_for_motion_
completed
bool true
Set to false to exit the Open node
before the motion is complete.
74