RBTNKDOC160609A
SystemElementsandMaintenanceManual
SUMMITXLmobileplatform
2.2MotorDrivers
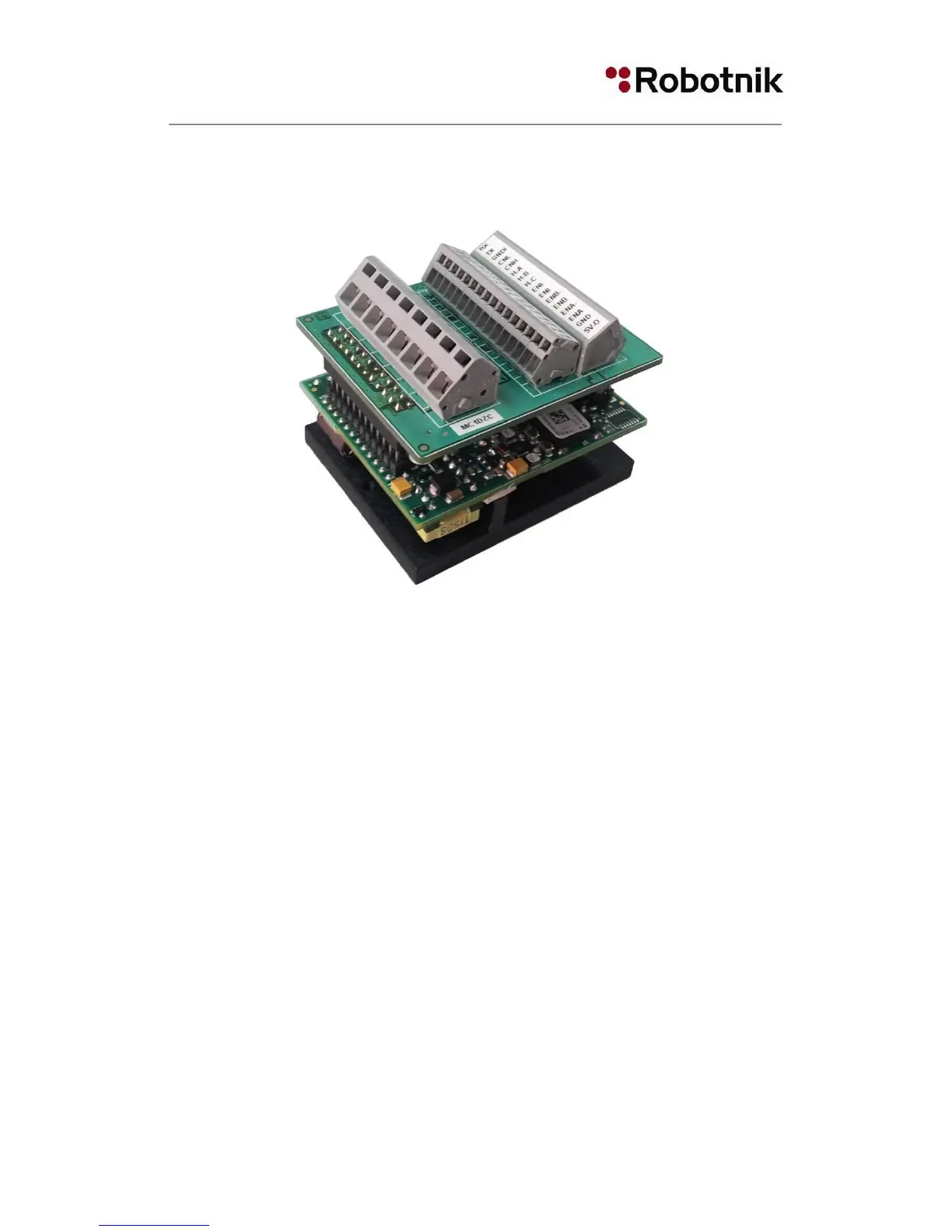
Figure4–MotorDriver
The motor drivers are four DZCANTE 020L080 with a MC1DZC connection board on
top.
The drivers are programmed at Robotnik with specific a settings for each motor. The
serial identifier is the default one (63), but each driver has its own CAN bus identifier (1,
2, 3 and 4). DO NOT change them from one motor to another. To reduce power
consumption,ifthevelocityiszero,onlytherearwheelsbrake,thefrontonesarefree.
The computer sends CAN messages to move the robot, and they are different from the
left side (1 & 2) and right side (3 & 4). Driver 1 is the only one with the Can bus resistor
installed.
There are several analog and digital input/outputs available in each driver, check driver
datasheetformoreinformation.
6