Rockwell Automation Publication 2080-UM002N-EN-E - November 2022 179
Chapter 9 Motion Control
When a motion control function block ends with an error, and the axis is in ErrorStop state, in
most cases, MC_Reset function block (or, MC_Power Off/On and MC_Reset) can be used to have
the axis to be recovered. With this, the axis can get back to normal motion operation without
stopping the controller operation.
Major Fault Handling In case the controller encounters issues where recovery is not possible through the Stop,
Reset, or Power function blocks, controller operation will be stopped and a major fault will be
reported.
Table 28 on page 180
defines the motion-related major fault codes for Micro830, Micro850, and
Micro870 controllers.
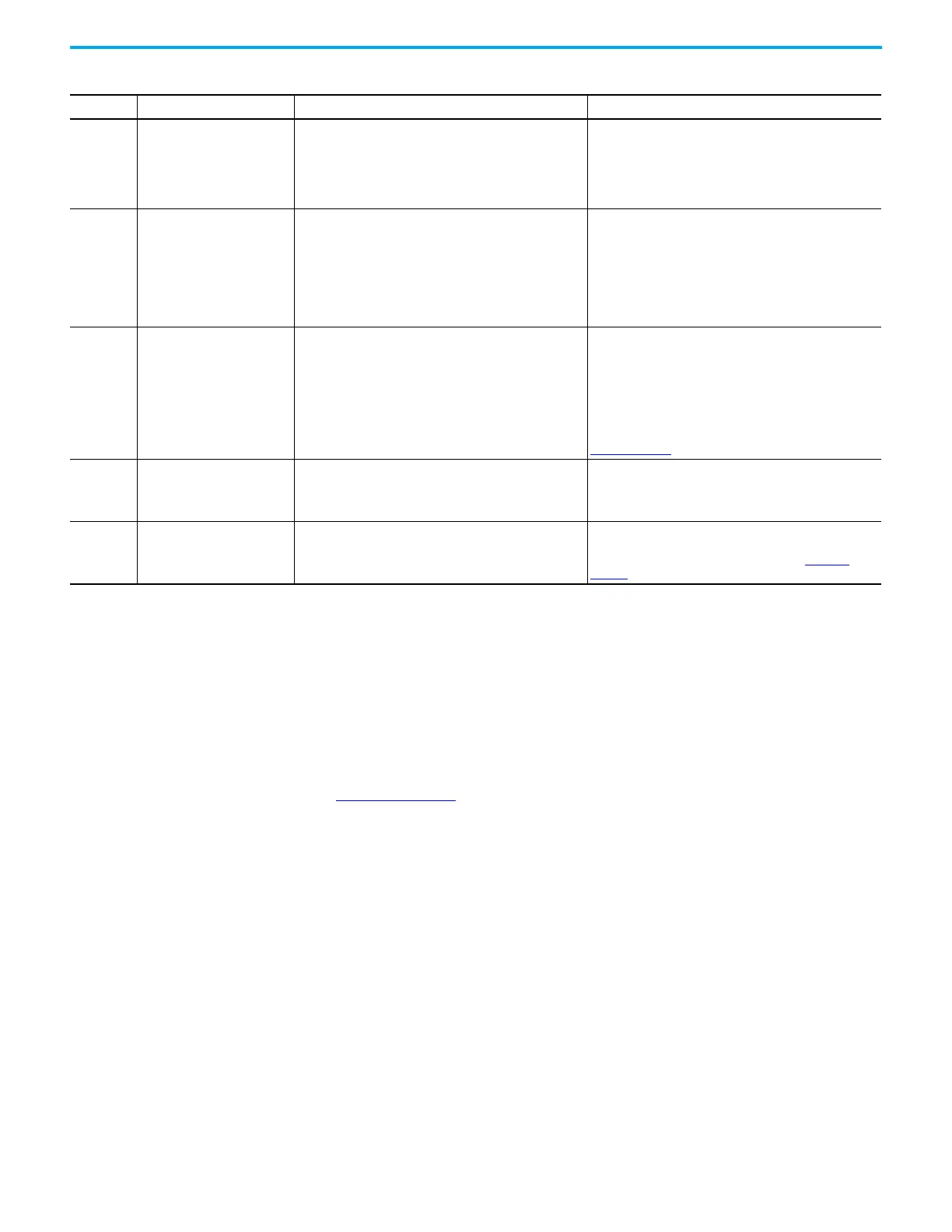
11 MC_FB_ERR_HARD_LIMIT
This function block is aborted as the Hard Limit switch
active state has been detected during axis movement, or
aborted as the Hard Limit switch active state has been
detected before axis movement starts.
Move the axis away from the hard limit switch in the
opposite direction.
The axis is not operational due to hard limit error detected.
Reset the state of the axis using the MC_Reset function
block, and then move the axis away from the hard limit
switch in the opposite direction.
12 MC_FB_ERR_LOG_LIMIT
This function block cannot execute as it will end up moving
beyond the PTO Accumulator logic limit, or the function
block is aborted as the PTO Accumulator logic limit has been
reached.
Check the velocity or target position settings for the
function block. Or, use MC_SetPosition function block to
adjust the axis coordinate system.
The axis is not operational due to PTO Accumulator logic
limit error detected, or due to expected PTO accumulator
logic limit error in a function block.
Reset the state of the axis using the MC_Reset function
block.
Check the velocity or target position settings for the
function block. Or, use MC_SetPosition function block to
adjust the axis coordinate system.
13 MC_FB_ERR_ENGINE
A motion engine execution error is detected during the
execution of this function block.
Cycle power to the entire motion setup, including controller,
drives and actuators, and then download the User
Application again.
If the fault is persistent, call Tech support.
The axis is not operational due to a motion engine execution
error.
Cycle power to the entire motion setup, including controller,
drives and actuators, and then download the User
Application again.
If the fault is persistent, contact your local Rockwell
Automation technical support representative. For contact
information, see:
rok.auto/support
16 MC_FB_ERR_NOT_HOMED
The Function Block cannot execute because the axis needs
to be homed first.
Execute homing against the axis using MC_Home Function
Block.
The axis is not operational because the axis is not homed.
Reset the state of the axis using the MC_Reset Function
Block.
128 MC_FB_PARAM_MODIFIED
Warning: The requested motion parameter for the axis has
been adjusted.
The function block executes successfully.
Motion internal Fault, Error ID = 0x80.
Contact your local Rockwell Automation technical support
representative. For contact information, see: rok.auto/
support
(1) You can view axis status through the Axis Monitor feature of the Connected Components Workbench software.
Table 27 - Motion Function Block and Axis Status Error ID (Continued)
Error ID Error ID MACRO Error Description for Function Block
Error Description for Axis Status
(1)
 Loading...
Loading...