Rockwell Automation Publication 2198-UM005C-EN-P - February 2022 161
Chapter 9 Kinetix 5300 Safe Torque Off Function
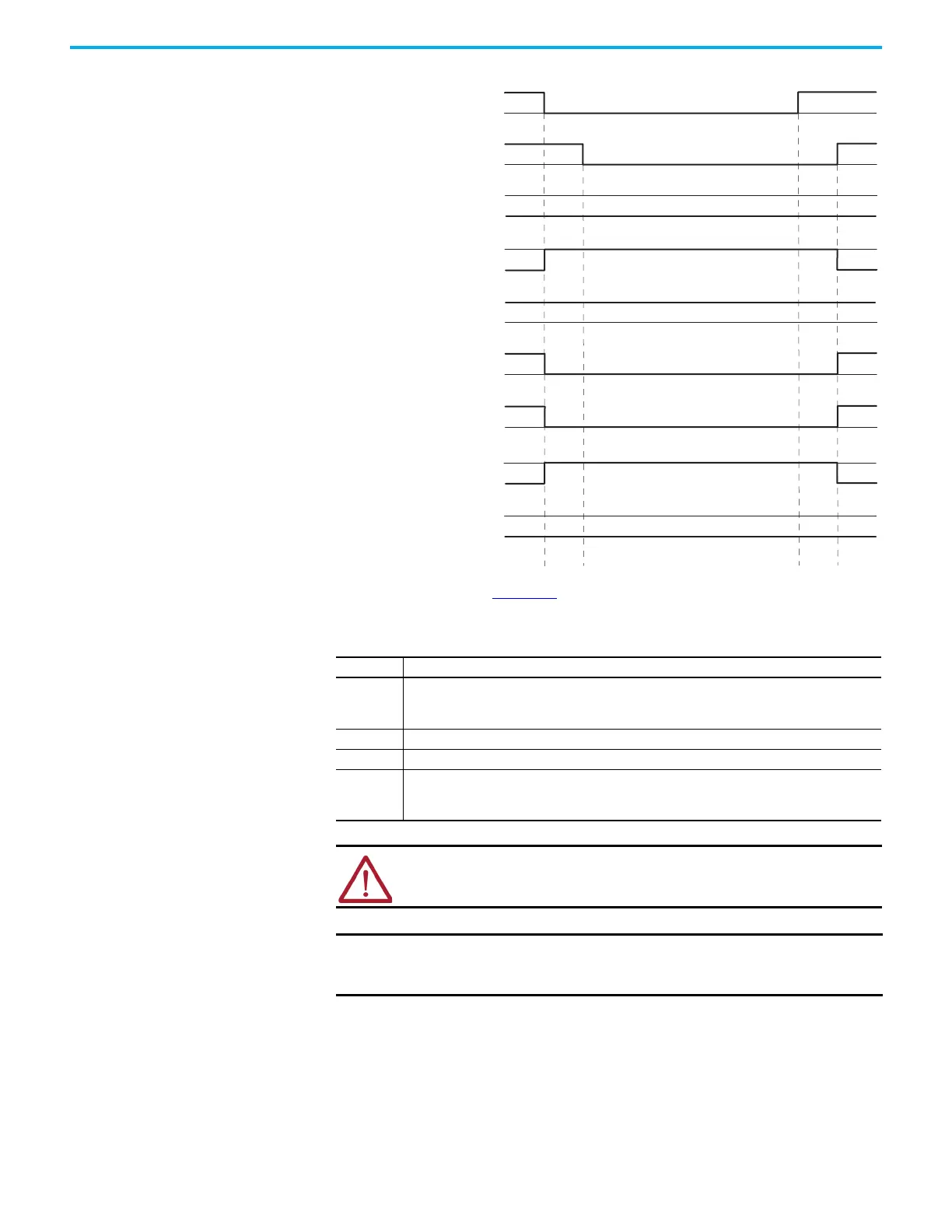
Figure 69 - Normal System Operation
All status attributes in Figure 69 are for status purposes only and should not be
used as a condition for motion.
1 2 3 4
24V DC
24V DC
0V DC
0V DC
1
1
0
0
0
1
1
0
1
0
0
1
1
0
GuardStopRequestStatus
GuardStopInputFault
SS_IN_CH0
SS_IN_CH1
GuardStopInputStatus
GuardGateDriveOutputStatus
GuardOkStatus
GuardFault
SafeTorqueOffInhibit
Event
Table 81 - Normal System Operation Legend
Event Description
1
SS_IN_CH0 is removed.
• GuardGateDriveOutputStatus, GuardOkStatus, and GuardStopInputStatus = 1
• SafeTorqueOffInhibit, GuardFault, GuardStopRequestStatus and GuardStopInputFault = 0
2 SS_IN_CH1 is removed < 1 second
3 SS_IN_CH0 is re-applied
4
SS_IN_CH1 is re-applied < 1 second of S1 or Event 3
• SafeTorqueOffInhibit, GuardOkStatus, and GuardStopRequestStatus = 1
• GuardFault, GuardGateDriveOutputStatus, GuardStopInputStatus and GuardStopInputFault = 0
ATTENTION: Permanent magnet motors can, in the event of two simultaneous
faults in the IGBT circuit, result in a rotation of up to 180 electrical degrees.
IMPORTANT If any of the STO inputs are de-energized, the Start Inhibit field indicates
SafeTorqueOffInhibit and GuardStopRequestStatus bit of AxisGuardStatus
tag set to 1.
 Loading...
Loading...



