146 Rockwell Automation Publication 2198-UM005C-EN-P - February 2022
Chapter 7 Troubleshoot the Kinetix 5300 Drive System
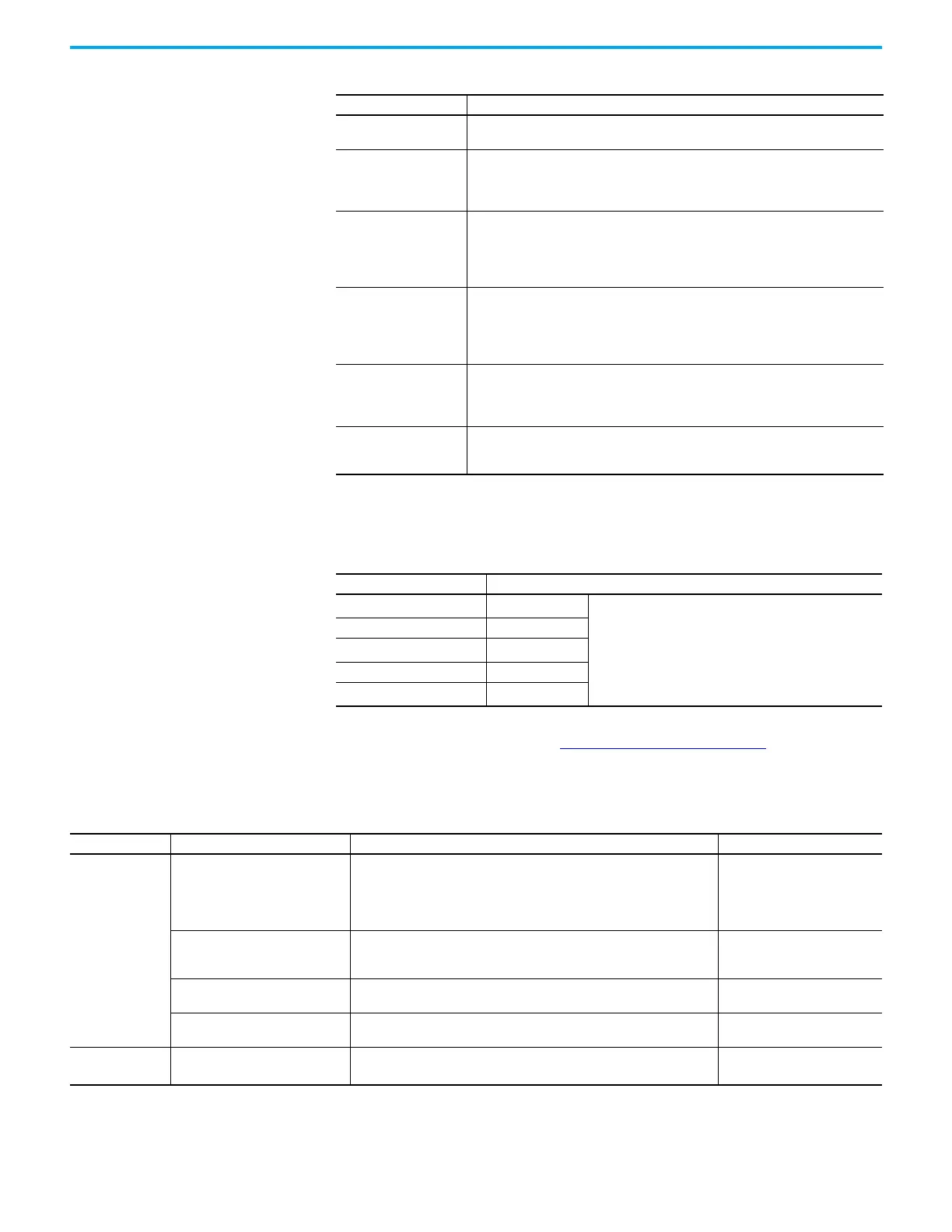
Table 73 - Logix Designer Exception Action Definitions
For Kinetix 5300 drives, only selected exceptions are configurable. In the drive
behavior tables, the controlling attribute is given for programmable fault
actions.
Table 74 - Configurable Stopping Actions
Actions define the drive behavior in response to specific conditions. The
Actions category includes Standard Actions and Safety Actions.
Table 75 - Actions Definitions
Exception Action Definition
Ignore
The controller completely ignores the exception condition. For some exceptions that are
fundamental to the operation of the planner, Ignore is not an available option.
Alarm
The controller sets the associated bit in the Motion Alarm Status word, but does not
otherwise affect axis behavior. Like Ignore, if the exception is so fundamental to the drive,
Alarm is not an available option. When an exception action is set to Alarm, the Alarm goes
away by itself when the exceptional condition has cleared.
Fault Status Only
Like Alarm, Fault Status Only instructs the controller to set the associated bit in the Motion
Fault Status word, but does not otherwise affect axis behavior. However, unlike Alarm an
explicit Fault Reset is required to clear the fault once the exceptional condition has cleared.
Like Ignore and Alarm, if the exception is so fundamental to the drive, Fault Status Only is
not an available option.
Stop Planner
The controller sets the associated bit in the Motion Fault Status word and instructs the
Motion Planner to perform a controlled stop of all planned motion at the configured
maximum deceleration rate. An explicit Fault Reset is required to clear the fault once the
exceptional condition has cleared. If the exception is so fundamental to the drive, Stop
Planner is not an available option.
StopDrive (v31 and earlier)
Disable (v32 and later)
When the exception occurs, the associated bit in the Fault Status word is set and the axis
comes to a stop by using the stopping action defined by the drive for the particular
exception that occurred. There is no controller based configuration to specify what the
stopping action is, the stopping action is device dependent.
Shutdown
When the exception occurs, the drive brings the motor to a stop by using the stopping
action defined by the drive (as in Stop Drive) and the power module is disabled. An explicit
Shutdown Reset is required to restore the drive to operation.
Stopping Action Description
Ramped Decel & Hold
(1)
(1) Ramped Decel is available only when General > Axis Configuration is set to Velocity Loop or Frequency Control.
Most control
The best available stopping action is the one that maintains the
most control over the motor. However, not all faults support
every stopping action.
Current Decel & Hold Most control
Ramped Decel & Disable
(1)
Less control
Current Decel & Disable Less control
Disable & Coast
(2)
(2) When configured for Frequency Control (induction motors only), select Decel & Disable only when the Current Limiting feature is
enabled. For more information on this feature, see Current Limiting for Frequency Control
on page 202.
Least control
Action Category Action Name Action Trigger Condition Available Actions
Standard
Disable (MSF) Stopping Action Execution of an MSF motion instruction.
• Ramped Decel & Hold
• Current Decel & Hold
• Ramped Decel & Disable
• Current Decel & Disable
• Disable & Coast
Connection Loss Stopping Action
Loss of the motion connection (for example, inhibiting the module or a network
cable disconnect).
• Ramped Decel & Disable
• Current Decel & Disable
• Disable & Coast
Motor Overload Action Receiving MTR OVERLOAD fault.
•Current Foldback
•None
Inverter Overload Action Receiving INV OVERLOAD fault.
•Current Foldback
•None
Safety Safe Torque Off Action
Transition from logic 0 to 1 of the SafeTorqueOffActiveStatus axis tag, which
indicates a safe torque-off action was commanded (STO).
(1)
Disable & Coast
(1) This action is executed only if the axis tag transitions due to a requested STO.
 Loading...
Loading...



