Rockwell Automation Publication 2080-UM002N-EN-E - November 2022 141
Chapter 8 EtherNet/IP Network
DriveStatus.5 BIT Indicates the deceleration state.
0 = Not decelerating
1 = Decelerating
Decelerating
DriveStatus.6 BIT Indicates the Travel Position direction.
0 = Reverse travel position
1 = Forward travel position
ForwardTravel
DriveStatus.7 BIT Indicates the fault state.
0 = Not faulted
1 = Faulted
Faulted
DriveStatus.8 BIT Indicates that the drive is at reference speed.
0 = Not at reference
1 = At reference
AtReference
DriveStatus.9 BIT Indicates that the drive is at commanded position.
0 = Not at position
1 = At position
AtPos
DriveStatus.10 BIT Indicates that the drive is at the reference home.
0 = Not at home
1 = At home
AtHome
DriveStatus.11 BIT
Indicates whether the drive has been homed since
power-up.
0 = Drive not homed
1 = Drive homed
DriveHomed
DriveStatus.12 BIT Indicates if the frequency is holding.
0 = Not sync hold
1 = Sync hold
SyncHold
DriveStatus.13 BIT
Indicates if the frequency accelerating to the new
commanded frequency in drive parameter A571 [Sync
Time].
0 = Not sync ramp
1 = Sync ramp
SyncRamp
DriveStatus.14 BIT Indicates if Traverse is enabled.
0 = Traverse off
1 = Traverse on
TraverseOn
DriveStatus.15 BIT Indicates if the drive is decelerating in Traverse mode.
0 = Not Traverse decel
1 = Traverse decel
TraverseDecel
OutputFreq INT Display the reference speed of the drive. In units of 0.01 Hz.
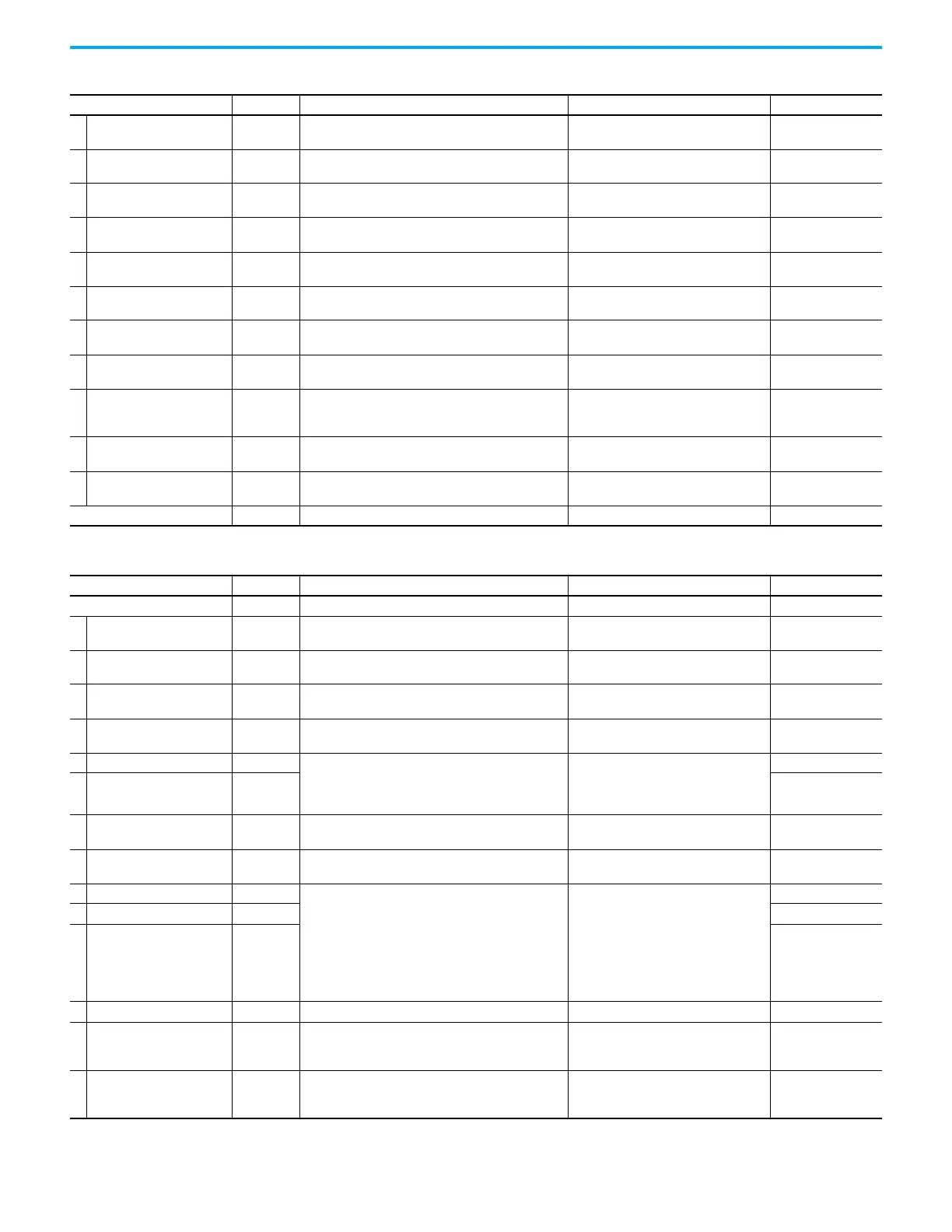
Table 19 - PowerFlex 520-series Drive Input Assembly Data (Position Mode) (Continued)
Name Data Type Description Value Comment
Table 20 - PowerFlex 520-series Drive Output Assembly Data (Position Mode)
Name Data Type Description Value Comment
LogicCommand INT
LogicCommand.0 BIT Perform a normal stop.
0 = Not normal stop
1 = Normal stop
Stop
LogicCommand.1 BIT Command the drive the start.
0 = Not start
1 = Start
Start
LogicCommand.2 BIT Command the drive to jog.
0 = Not jog
1 = Jog
Jog
LogicCommand.3 BIT Clear drive fault.
0 = Not clear fault
1 = Clear fault
ClearFaults
LogicCommand.4 BIT
Command the direction of the drive.
00 = No command
01 = Forward command
10 = Reverse command
11 = No command
Forward
LogicCommand.5 BIT Reverse
LogicCommand.6 BIT
This provides an identical function as the “Logic In1”
Digital Input option.
1 = Logic In 1 LogicIn1
LogicCommand.7 BIT
This provides an identical function as the “Logic In2”
Digital Input option.
1 = Logic In 2 LogicIIn2
LogicCommand.8 BIT
Select the pre-programed frequency and position step.
000 = Frequency and position step 0
001 = Frequency and position step 1
010 = Frequency and position step 2
011 = Frequency and position step 3
100 = Frequency and position step 4
101 = Frequency and position step 5
110 = Frequency and position step 6
111 = Frequency and position step 7
Freq_PosSel01
LogicCommand.9 BIT Freq_PosSel02
LogicCommand.10 BIT Freq_PosSel03
LogicCommand.11 BIT Next start command causes the drive to find home. 1 = Find home FindHome
LogicCommand.12 BIT
Overrides other inputs and causes the drive to remain
at its current step (running at zero speed once it
reaches its position) until released.
1 = Hold step HoldStep
LogicCommand.13 BIT
Resets the home position to the current position of the
machine. Set this bit to 0 after completing the homing
routine.
1 = Pos redefine PosRedefine
 Loading...
Loading...







