7. EXPLANATION OF PARAMETERS
7-32
Mode Page
Abbre-vi
ation
Name and description
Standard
value
Unit
Setting
range
Remarks
9 24 to
31
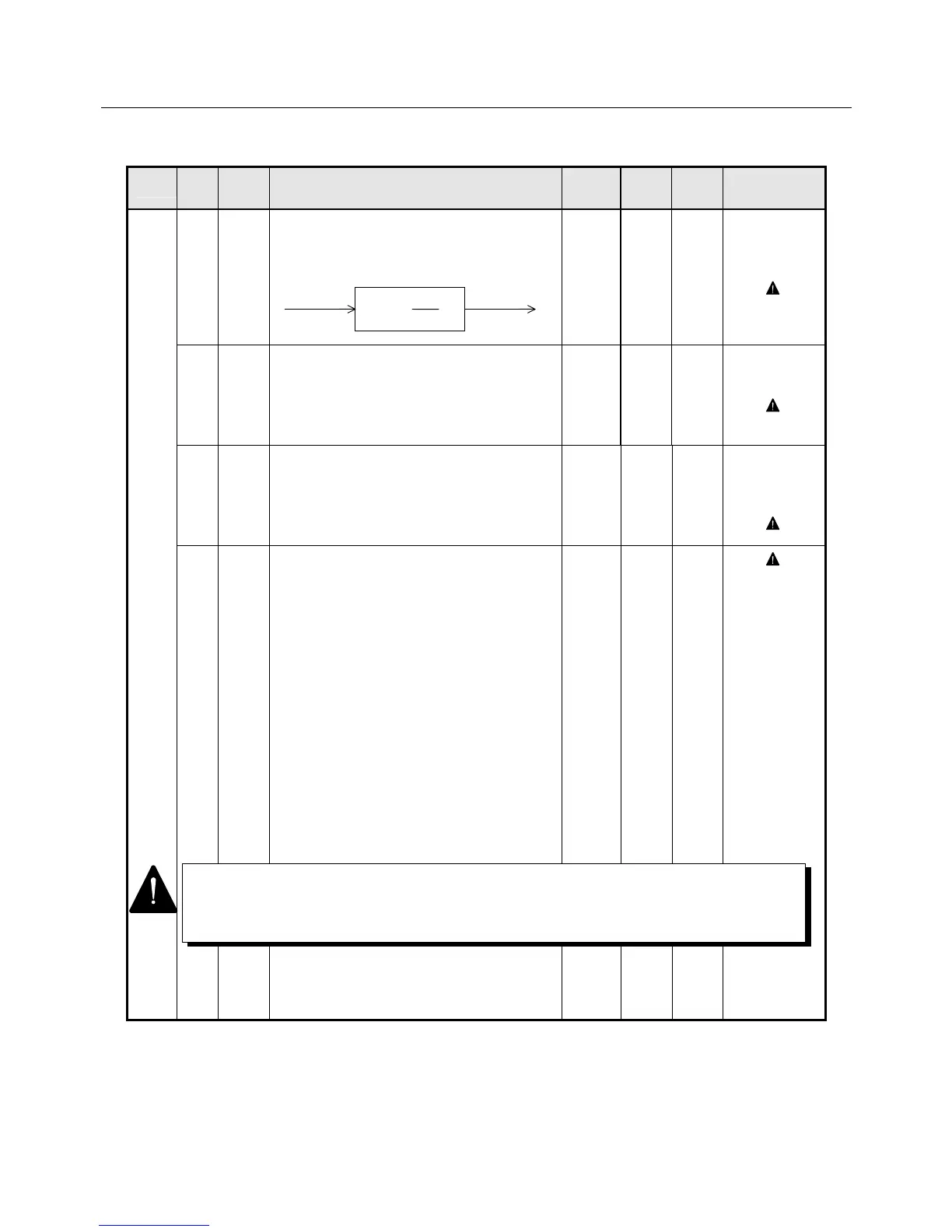
Tvi0
to
Tvi7
Velocity loop integral time constant
• Integral time constant of the velocity controller
(proportional integral control).
15
(20)
mSec 1 to
1000
Position and
velocity control
( 1)
32 to
39
FLP0
to
FLP7
Feed forward LPF
• This parameter sets the cut off frequency of
the low pass filter for the position loop feed
forward command.
1000 Hz 1 to
1000
Position control
( 2)
40 to
47
VLP0
to
VLP7
Velocity command LPF
• This parameter sets the cut off frequency of
the primary low pass filter for the velocity
command.
1000 Hz 1 to
1000
Position and
velocity control
( 2)
48 to
55
ILP0
to
ILP7
Current command LPF
• This parameter sets the cut off frequency of
the primary low pass filter for the current
command in the velocity loop.
450 Hz 1 to
1000
( 2)
Values in parentheses are applicable to motors of other than P3 and P5 series.
Kvp(1+∫ dt)
1
Tvi
Velocity
loop output
Velocity
deviation
1 Selecting 1000 ms turns on the proportional control.
2 Selecting 1000 Hz disables the filter function.