9. SPECIFICATIONS
9-31
(3) External analog current limit input
Both the forward revolution driving current (positive side current) and the backward revolution driving
current (negative current) can be independently limited externally (when parameter Func1 bit0 is set at
"1").
Regarding the relationship with the motor armature current, the current is limited to 2 V/rated current
(IR) by the applied motor.
The same limit value for the backward revolution driving current as that for forward revolution can be
selected. Switching of the polarity between positive and negative (see the Func1 parameter in Chapter
7) is also possible.
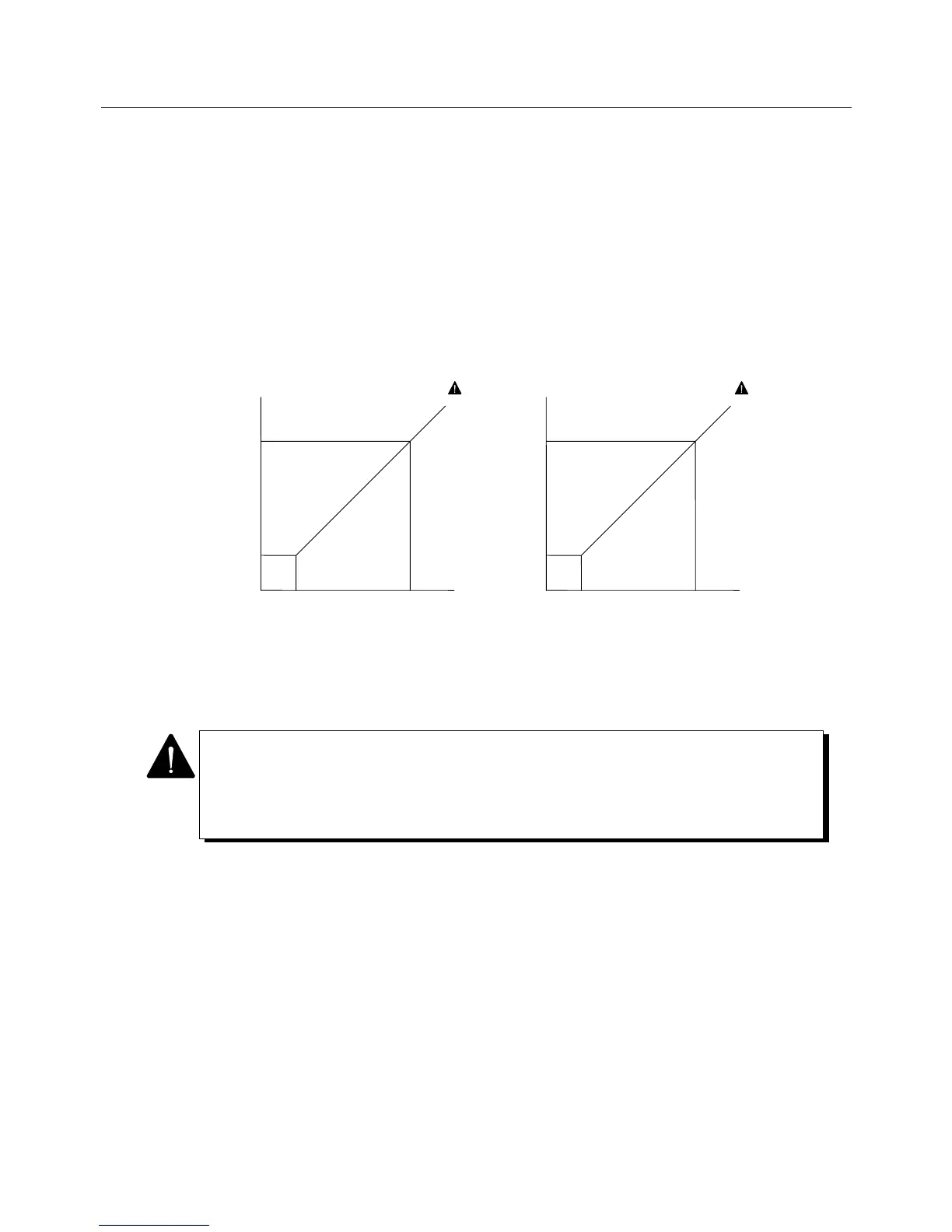
Fig. 9-15 shows the relationship between the set voltage and the current limit value.
Fig. 9-15 Set Voltage and Current Limit Value
(4) Torque compensation input
For the characteristics of the torque compensation input and motor generation torque, see Fig. 9-17 (the
same as the torque command input of the torque command type).
This input is effective for decreasing the acceleration time or switching the quadrant.
1 If a value exceeding the instantaneous maximum stall armature current (Ip) of the
Servomotor is set, the system is saturated at Ip.
2 To lock the motor by means of a bump stop by applying an external current limit, set the
current limit value below the rated armature current.
Armature current
Armature current
0 0
(Approx.
0.6 V)(Approx. 0.6 V)
1 1
2.0 −2.0
IR IR
Set voltage (V) Set voltage (V)
(a) Forward revolution current limit (PIL) (b) Backward revolution current limit (NIL)
(when negative polarity is selected)