11. SPECIAL SERVO FUNCTION
11-6
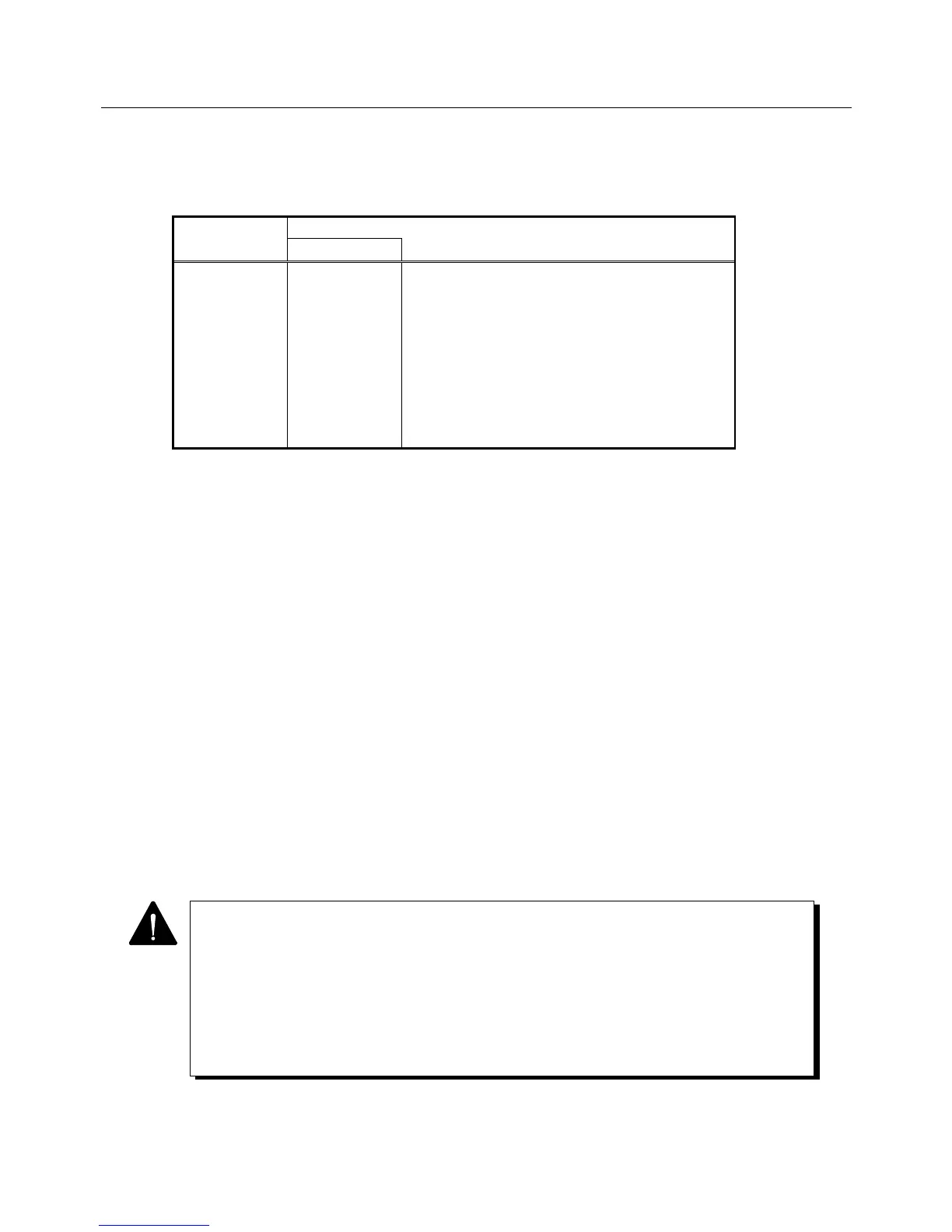
(2) Real time automatic tuning level (Tn_Lv: Mode3 page5)
Setting level when executing tuning according to the device rigidity.
Procedure
Tn_Lv setting
Device rigidity
+5
+4
↓
+1
0
-1
↓
-4
-5
High rigidity
↓
Middle rigidity
↓
Low rigidity
Equivalent to “High” of offline automatic tuning
Equivalent to “Middle” of offline automatic tuning
Equivalent to “Low” of offline automatic tuning
(3) Observer/ load inertia ratio (O_JL: Mode8 page4)
The parameters to estimate load torque required when finding proper gain by real time automatic
tuning.
Set O_JL[%] = load inertia JL / Motor inertia JM × 100
Normally, load inertia JL should be an average within variation range of load inertia (or most used
value). If appropriate tuning cannot be done within “+5 to -5” range of real time automatic tuning
level setting (Tn_Lv), High/ Low rigidity setting can be feasible by adjusting observer/ load inertia
ratio.
• In case of making estimated gain larger though Tn_Lv = +5 is set
→ Set the observer/ load inertia ratio (O_JL) to the maximum inertia value in the variation
range of device inertia.
→ Set the observer/ load inertia ratio (O_JL) over the maximum inertia value in the variation
range of device inertia.
• In case of making estimated gain smaller though Tn_Lv = -5 is set
→ Set the observer/ load inertia ratio (O_JL) to the minimum inertia value in the variation
range of device inertia.
→ Set the observer/ load inertia ratio (O_JL) smaller than the minimum inertia value in the
variation range of device inertia
• When changing observer/ load inertia ratio (O_JL) during operation, estimating load torque
will be stopped momentary. Therefore, the operation may be momentary unstable after
change.
• When widely changing observer/ load inertia ration (O_JL) at once, estimated servo gain
will increase outstandingly and may turn into oscillation status. Change gradually with
monitoring operating status.
• Change parameters related to real time automatic tuning, only after securing the safety
around devices.