6. Where supported, hardware CANbus fault detection should be enabled at 5901
h
to ensure
CANbus fault detection is always enabled.
7. Configure additional SDO servers. An SDO server allows another CANopen device to SDO
read/write from a node’s object dictionary. Each node has one default SDO server (1200
h
)
which is reserved for communication with configuration tools like DVT or the calibrator.
Another 3 SDO servers can be configured at 1201
h
to 1203
h
. These should be used as follows:
a. On slave nodes, configure a server to allow the master node to communicate.
b. If there is a display in the system, configure a server to allow the display access.
8. Configure RPDOs (1400
h
to 17FF
h
) and TPDOs (1800
h
to 1BFF
h
) appropriately for the system.
9. Configure the RPDO timeout function if required. See section PDO (page 45) for more
information.
10. Set up the VCU to comply with the required H-protocol and I-protocol messages for motor
control and I/O control.
3
rd
Party CANopen Devices
At power up, the Dragon8 master will communicate with all slave nodes to identify which nodes are
Sevcon devices and which are not using the vendor ID in 1018
h
. This instructs the Dragon8 how to
handle EMCY messages from each node.
Dragon8 knows how to react to EMCYs (faults) from Sevcon slaves and can take appropriate action.
Dragon8 does not know how to react to EMCYs from 3
rd
party devices, so the required fault reaction to
3
rd
party device EMCYs must be set at 2830
h
.
PDOs
The controller supports 5 RPDOs (receive PDOs) and 5 TPDOs (transmit PDOs). Up to 8 Object
Dictionary entries can be mapped to each PDO. Every PDO must have a unique identifier (COB-ID).
Setup RPDOs and TPDOs to transmit and receive non-critical data between CANbus nodes.
H-protocol and I-protocol should be used to communicate motor and I/O data.
The easiest way to do this is using DVT. If you are using a 3
rd
party configuration tool, the relevant
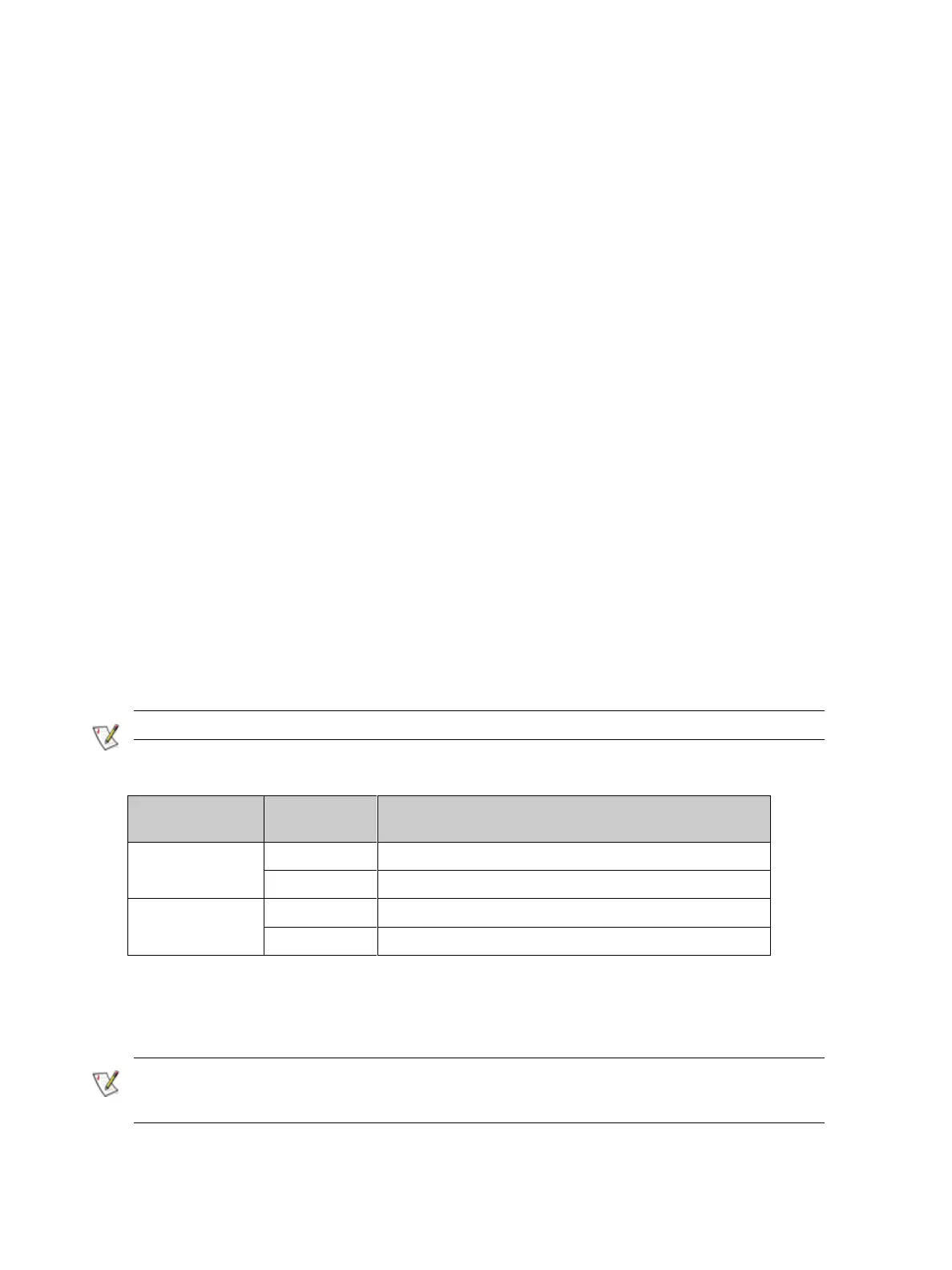
Object Dictionary indices are listed in Table 16.
Table 16 Objects associated with mapping
Dragon8 supports RPDO timeout fault detection. This can set a warning, drive inhibit or severe fault
depending on the configuration in 5902
h
.
RPDO timeout can be used for non-CANopen systems which do not support heartbeating. By default, RPDO
timeout is disabled, and normal CANopen heartbeating protocol (see section Network Configuration (page 44)) is
assumed to be used.