Sending data
Note
The parameters listed in the following description refer to the assignment of SINAMICS Link
to IF1. If you assigned SINAMICS Link to IF2, then you find the corresponding parameters in
the "Table A-49 Corresponding parameters (Page 207)".
In this example, the first "Control Unit 1" node has two drive objects: "Drive 1" and "Drive 2".
Proceed as follows to send data:
1. If SINAMICS Link is assigned to IF1, then for each drive object, in its associated parameter
p2051[0...31], you define which data (PZDs) should be sent.
If SINAMICS Link was assigned IF2, then p8851 must be used for the setting. The data is
simultaneously reserved in the send slot of the p8871[0...31].
2. Enter the double words in p2061[x].
Double word data is simultaneously written to p8861[0...31].
3. For each drive object, allocate the send parameters in p8871[0...31] to a send slot of its
own node.
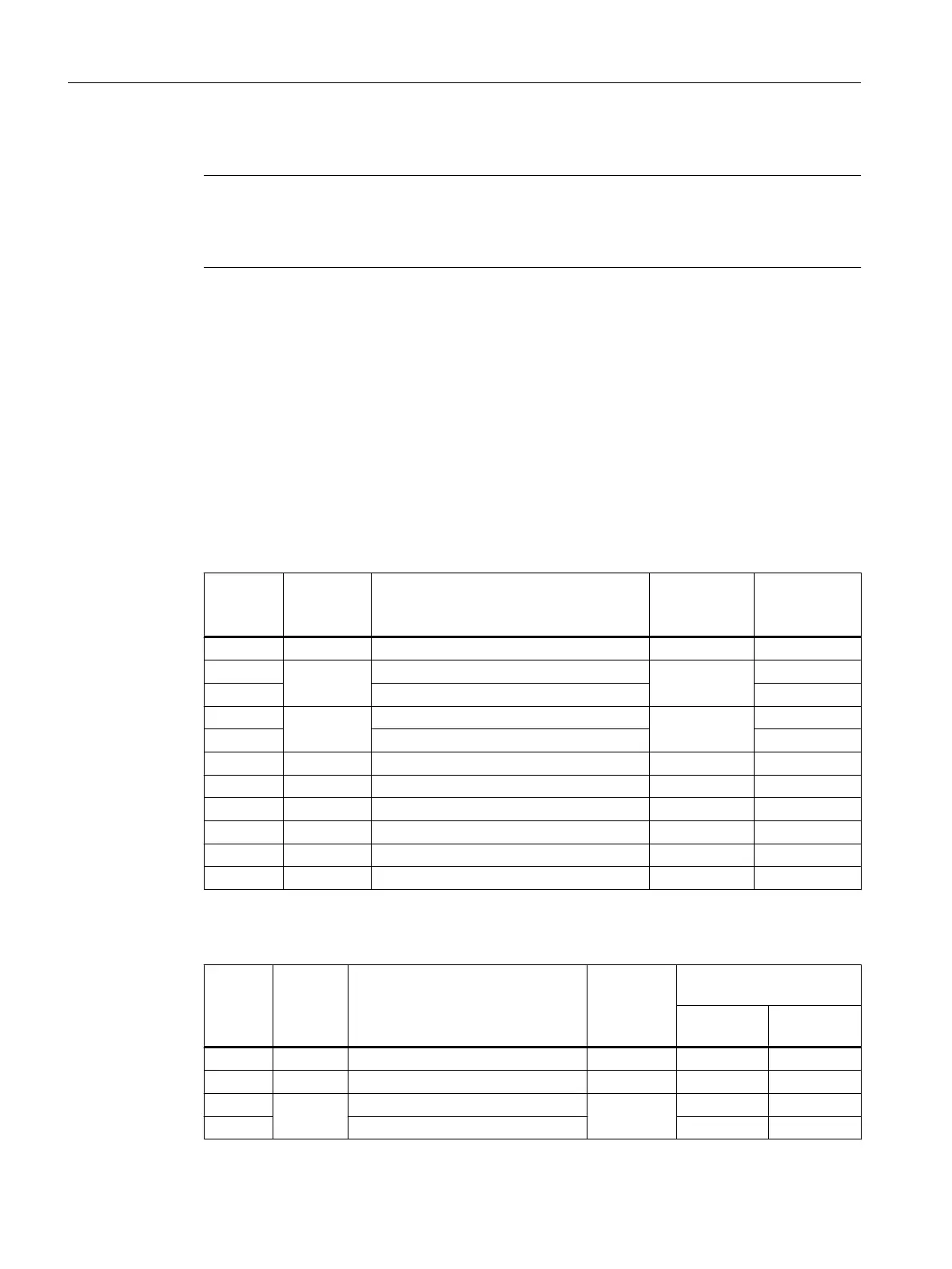
Table A-50 Compile send data of drive 1 (DO2)
p2051[x]
Index
p2061[x]
Index
Contents From parame‐
ter
Telegram
word p8871
0 - ZSW1 r0899 1
- 1 Actual speed value part 1 r0061[0] 2
- Actual speed value part 2 3
- 3 Actual torque value part 1 r0080 4
- Actual torque value part 2 5
5 - Actual fault code r2131 6
6 - 0 0 0
... - ... - ...
15 - 0 0 0
... - ... - ...
31 - 0 0 0
Table A-51 Compile send data of drive 2 (DO3)
p2051[x]
Index
p2061[x]
Index
Contents From pa‐
rameter
Slots in the send buffer
p8871[x]
x Telegram
word
- - - - 0...5
1)
0
0 - ZSW1 r0899 6 7
- 1 Actual speed value part 1 r0061[0] 7 8
- Actual speed value part 2 8 9
Communication
A.1 Communication
Industrial Security
208 Configuration Manual, 08/2017, A5E36912609A