Detailed Description
2.3 Setpoint/actual-value system
Velocities, Setpoint/Actual-Value Systems, Closed-Loop Control (G2)
2-40 Function Manual, 08/2005 Edition, 6FC5397-0BP10-0BA0
Direct measuring system (DM) is on machine directly: Load-side encoder
Indirect measuring system (IM) is on motor indirectly: Motor-side encoder
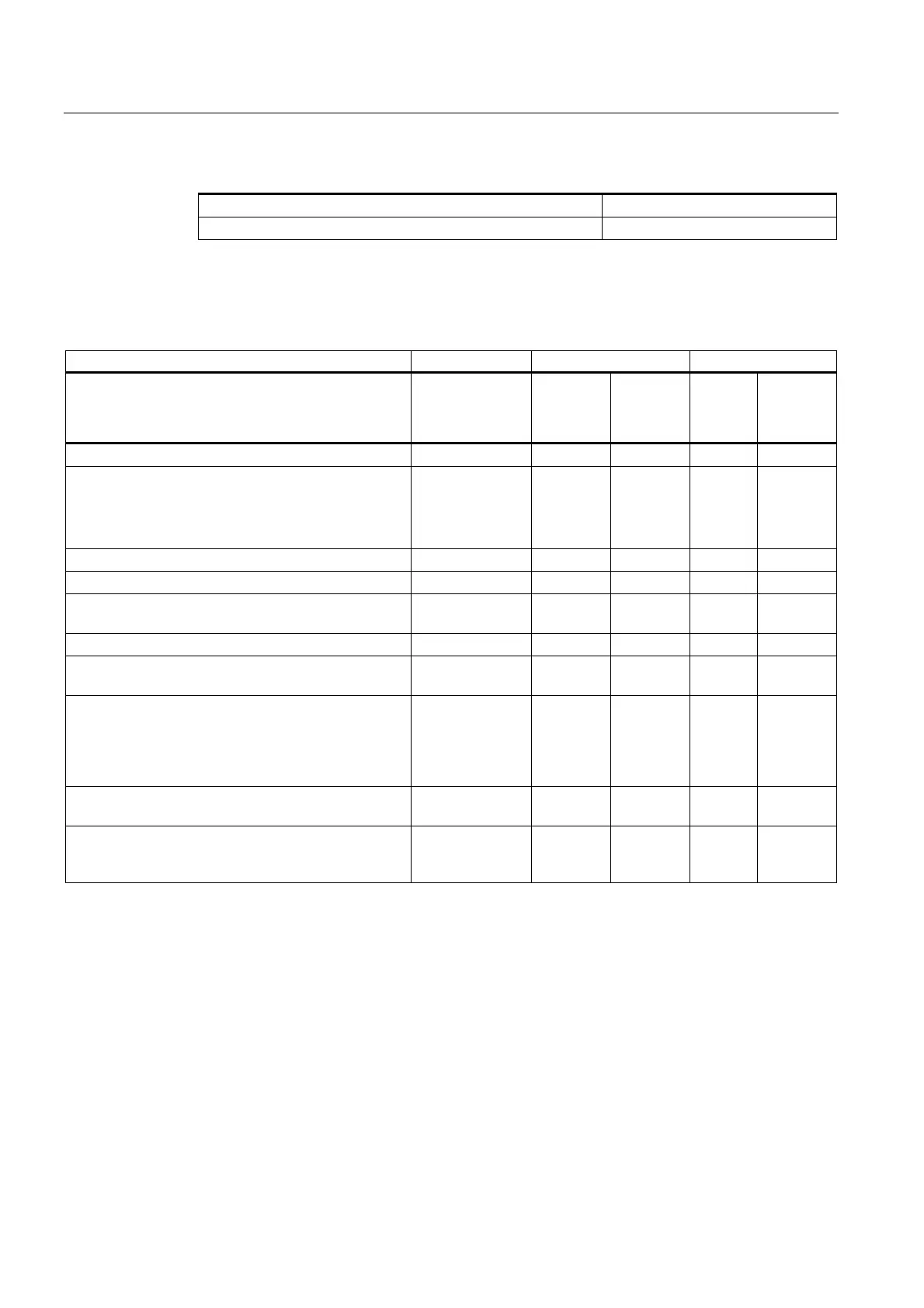
Depending on the type of axis (linear axis, rotary axis) and the type of actual-value
acquisition (directly at the machine, indirectly at the motor), the following machine data must
be parameterized to calculate the actual-value resolution:
Machine data Linear axis Linear axis Rotary axis
Linear scale/
or as direct
measuring
system
Encoder
on
motor
Encoder
on
machine
and/or tool
Encoder
on
motor
Encoder
on
machine
and/or tool
MD30300 $MA_IS_ROT_AX 0 0 0 1 1
MD31000 $MA_ENC_IS_LINEAR[n]
MD31010 $MA_ENC_GRID_POINT_DIST[n]
MD34320 $MA_ENC_INVERS[n]
1
Spacing
Opposite
direction
0
-
-
0
-
-
0
-
-
0
-
-
MD31040 $MA_ENC_IS_DIRECT[n] - / (1) 0 1 0 1
MD31044 $MA_ENC_IS_DIRECT2[n] - / (1) 0 1 0 1
MD31020 $MA_ENC_RESOL[n] - Pulses/
rev
Pulses/
rev
Pulses/
rev
Pulses/
rev
MD31030 $MA_LEADSCREW_PITCH - mm/rev. mm/rev. - -
MD31050 $MA_DRIVE_AX_RATIO_DENOM[n] - Load
rev.
- Load
rev.
See
note
MD31060 $MA_DRIVE_AX_RATIO_NUMERA[n] - Motor
rev. if
infeed
gear
available
- Motor
rev.
See
note
MD31070 $MA_DRIVE_ENC_RATIO_DENOM[n] - Encoder
rev.
Encoder
rev.
Encoder
rev.
Encoder
rev.
MD31080 $MA_DRIVE_ENC_RATIO_NUMERA[n] - Motor-
side
encoder*
Motor
rev.
Motor
rev.
Load
rev.
- = Does not apply to this combination
* The encoder on the motor side is a built-in encoder and, therefore, does not have a measuring gear unit.
The transmission ratio is always 1:1.
 Loading...
Loading...















