Detailed Description
2.3 Setpoint/actual-value system
Velocities, Setpoint/Actual-Value Systems, Closed-Loop Control (G2)
2-46 Function Manual, 08/2005 Edition, 6FC5397-0BP10-0BA0
In order to adapt the actual-value resolution to the calculation resolution, the control
calculates the quotients from the "internal increments/mm" and the "encoder increments/mm"
as follows:
'5,9(B(1&B5$7,2B180(5$>Q@
,17B,1&5B3(5B00
/($'6&5(:B3,7&+
'5,9(B(1&B5$7,2B'(120>Q@
,QWHUQDOLQFUHPHQWVPP
(QFRGHULQFUHPHQWVPP
(1&B5(62/>Q@LQWHUQDOPXOWLSOLFDWLRQ
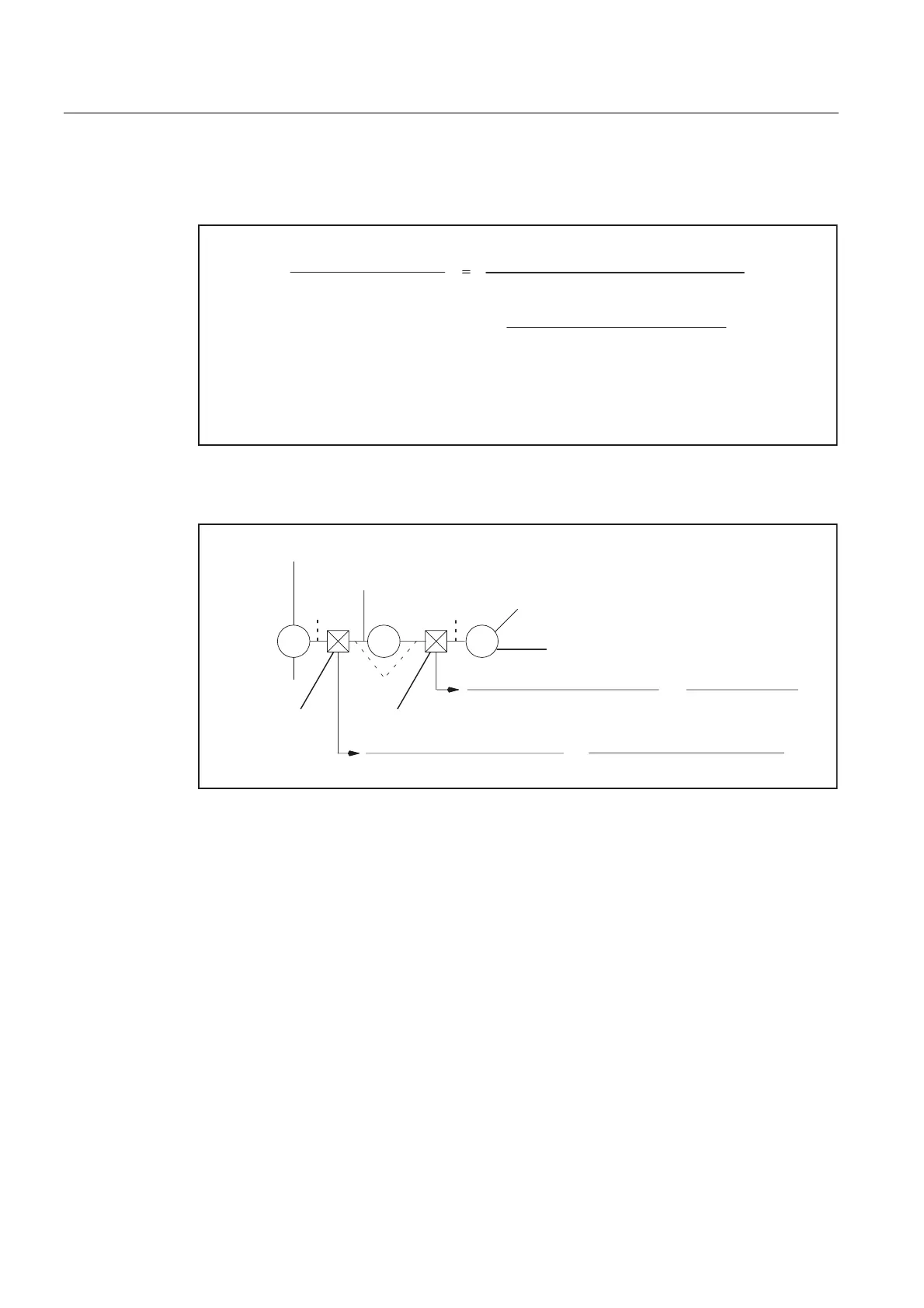
Rotary axis with rotary encoder on motor
Q
Q
(1&B5(62/
(1&B,6B',5(&7
(1&B,6B/,1($5
,6B527B$;
'5,9(B$;B5$7,2B180(5$
'5,9(B$;B5$7,2B'(120
'5,9(B(1&B5$7,2B180(5$
'5,9(B(1&B5$7,2B'(120
Q
*0 /
1RRIORDGUHYV
5HVROYHUJHDULQJ
/RDGJHDU
5RWDU\WDEOH
/RDG
(QFRGHU
1RRIPRWRUUHYV
1XPEHURIHQFRGHUUHYROXWLRQV
1XPEHURIPRWRUUHYROXWLRQV
0RWRU
Fig. 2-9 Rotary axis with rotary encoder on motor
In order to adapt the actual-value resolution to the calculation resolution, the control
calculates the quotients from the "internal increments/degree" and the "encoder
increments/degree" as follows:
Example for rotary axis with encoder on motor
Rotary axis with rotary encoder (2048 pulses) on motor;
internal multiplication (2048)
Gear: Motor/rotary axis 5
1000 increments per degree
 Loading...
Loading...















