Detailed Description
2.4 Frames
Axis Types, Coordinate Systems, Frames (K2)
2-44 Function Manual, 08/2005 Edition, 6FC5397-0BP10-0BA0
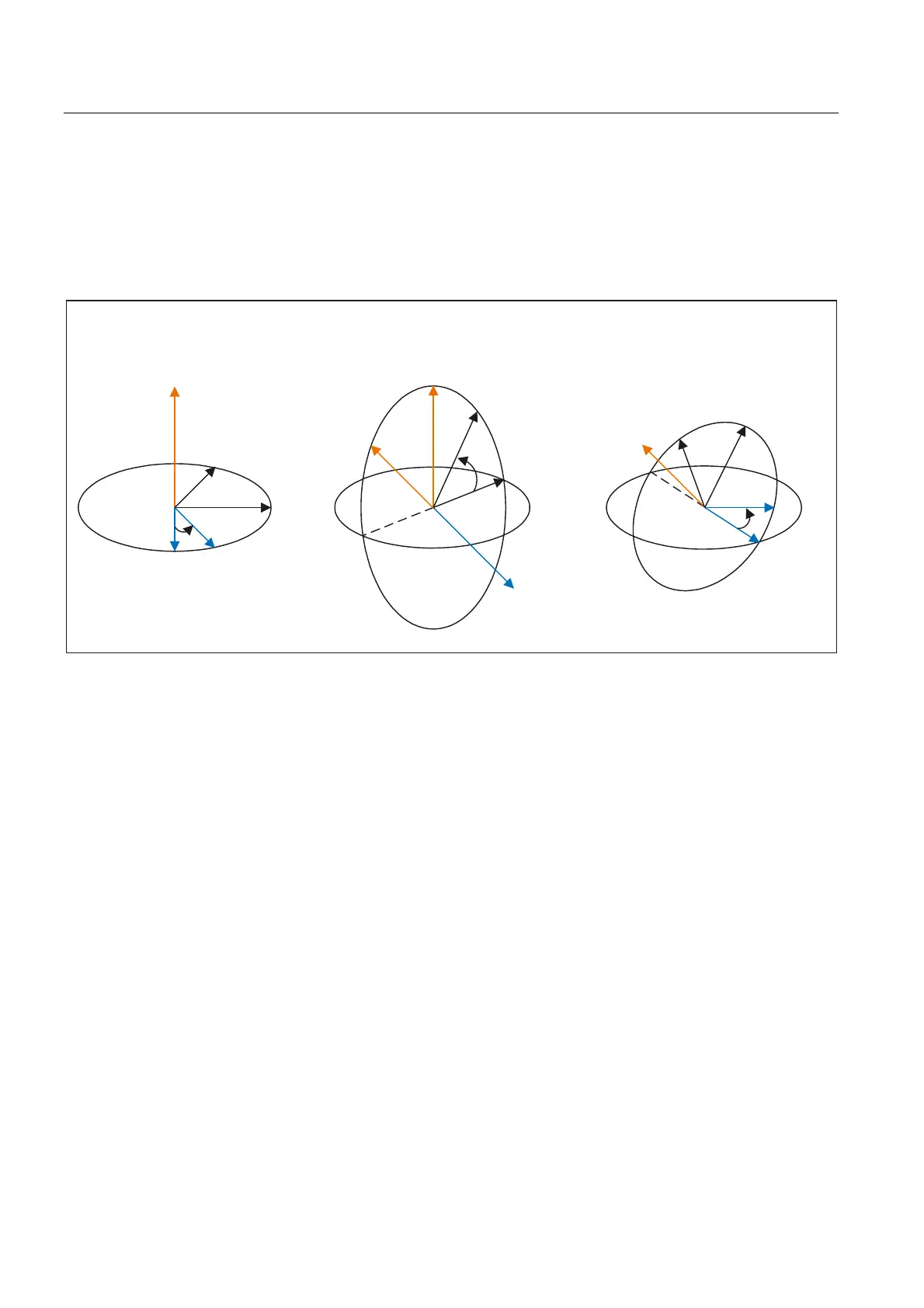
Euler angle
Rotations with a Euler angle are carried out in the order Z, X', Z''.
5RWDWLRQDERXW]
5RWDWLRQDERXW[ 5RWDWLRQDERXW]
[
[
\
\
]
\
[ [
]
\
]
[
[
\
\
] ]
The angles are only defined ambiguously in the following ranges:
0 <= x < 180
-180 <= y <= 180
-180 <= z <= 180
The written angles can be uniquely read back again in these areas. When rotations that are
larger than the specified angles are entered, these are converted to a mode of
representation that does not exceed the specified range limits.
RPY example:
$P_UIFR[1] = crot(x, 10, y, 90, z, 40), when read back, produces
$P_UIFR[1] = crot(x, 0, y, 90, z, 30).
$P_UIFR[1] = crot(x, 190, y, 0, z, -200), when read, produces
$P_UIFR[1] = crot(x, -170, y, 0, z, 160).
On writing and reading frame rotation components, these limits should be observed so the
same results are achieved on writing and reading, or on repeated writing.
 Loading...
Loading...















