Transformations
7.9 Cartesian PTP travel
Job planning
Programming Manual, 03/2006 Edition, 6FC5398-2BP10-1BA0
7-69
Parameters
The PTP and CP commands act in a modal manner. CP is the default setting.
If modal applies when programming the STAT value, TU programming is = <...> non-modal.
Another difference is that programming a STAT value only has an effect during vector
interpolation, while programming TU is also evaluated during active round axis interpolation.
PTP
point to point (point to point motion)
The movement is executed as a synchronized axis movement; the slowest
axis involved in the movement is the dominating axis for the velocity.
CP
continuous path (path motion)
The movement is executed as Cartesian path motion.
STAT= Position of the articulated joints; this value is dependent on the
transformation.
TU= TURN information acts blockwise. This makes it possible to clearly
approach axis angles between -360 degrees and +360 degrees.
Example
;
<
$
=
(OERZGRZQ
(OERZXS
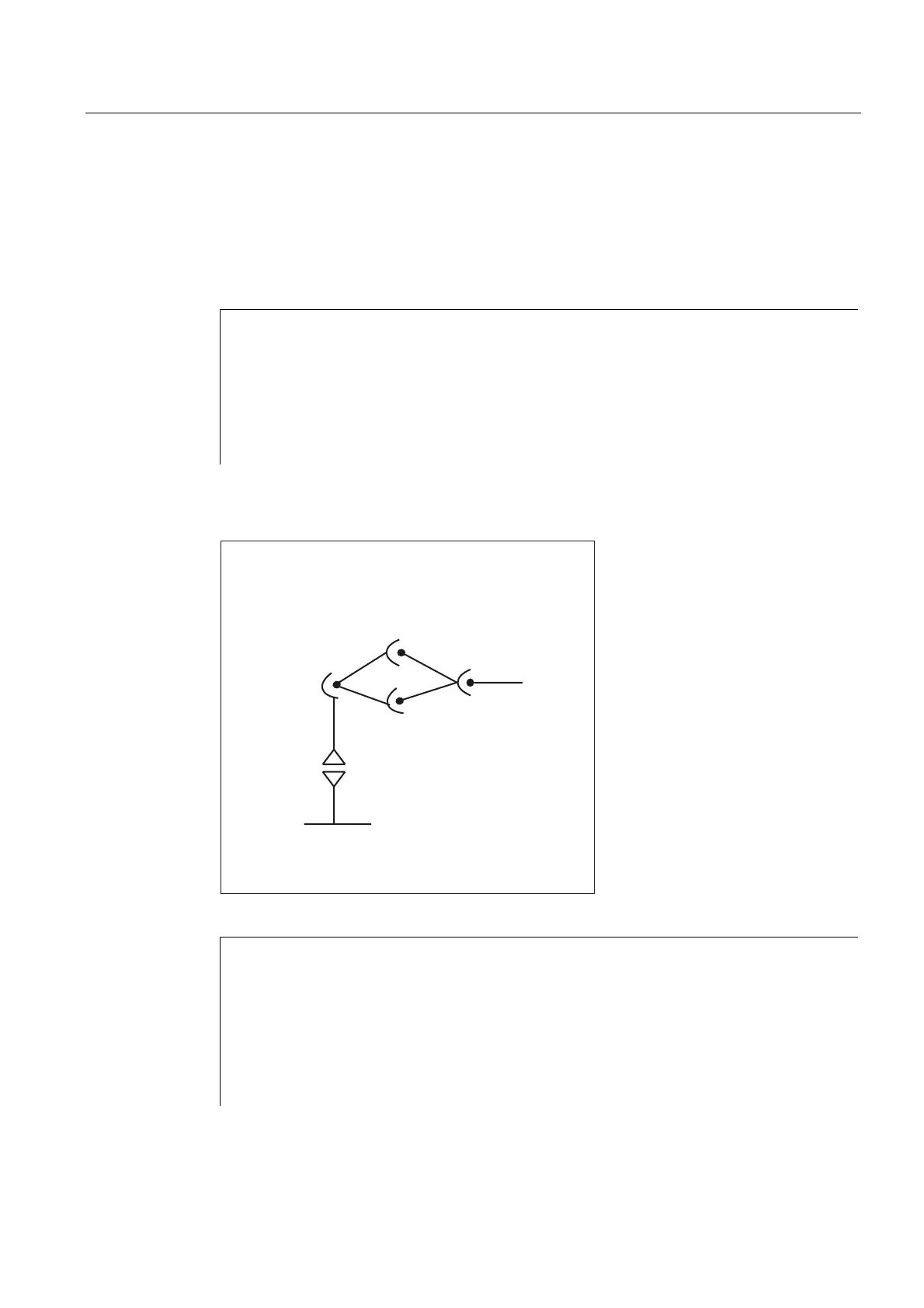
N10 G0 X0 Y-30 Z60 A-30 F10000 ;Initial setting
→ Elbow up
N20 TRAORI(1) ;Transformation ON
N30 X1000 Y0 Z400 A0
N40 X1000 Z500 A0 STAT='B10' TU='B100' PTP ;Reorientation without transformation
→ Elbow down
N50 X1200 Z400 CP ;Transformation active again
N60 X1000 Z500 A20
N70 M30

 Loading...
Loading...



















