Path traversing behavior
9.5 Feedrate response (FNORM, FLIN, FCUB, FPO)
Job planning
9-38 Programming Manual, 03/2006 Edition, 6FC5398-2BP10-1BA0
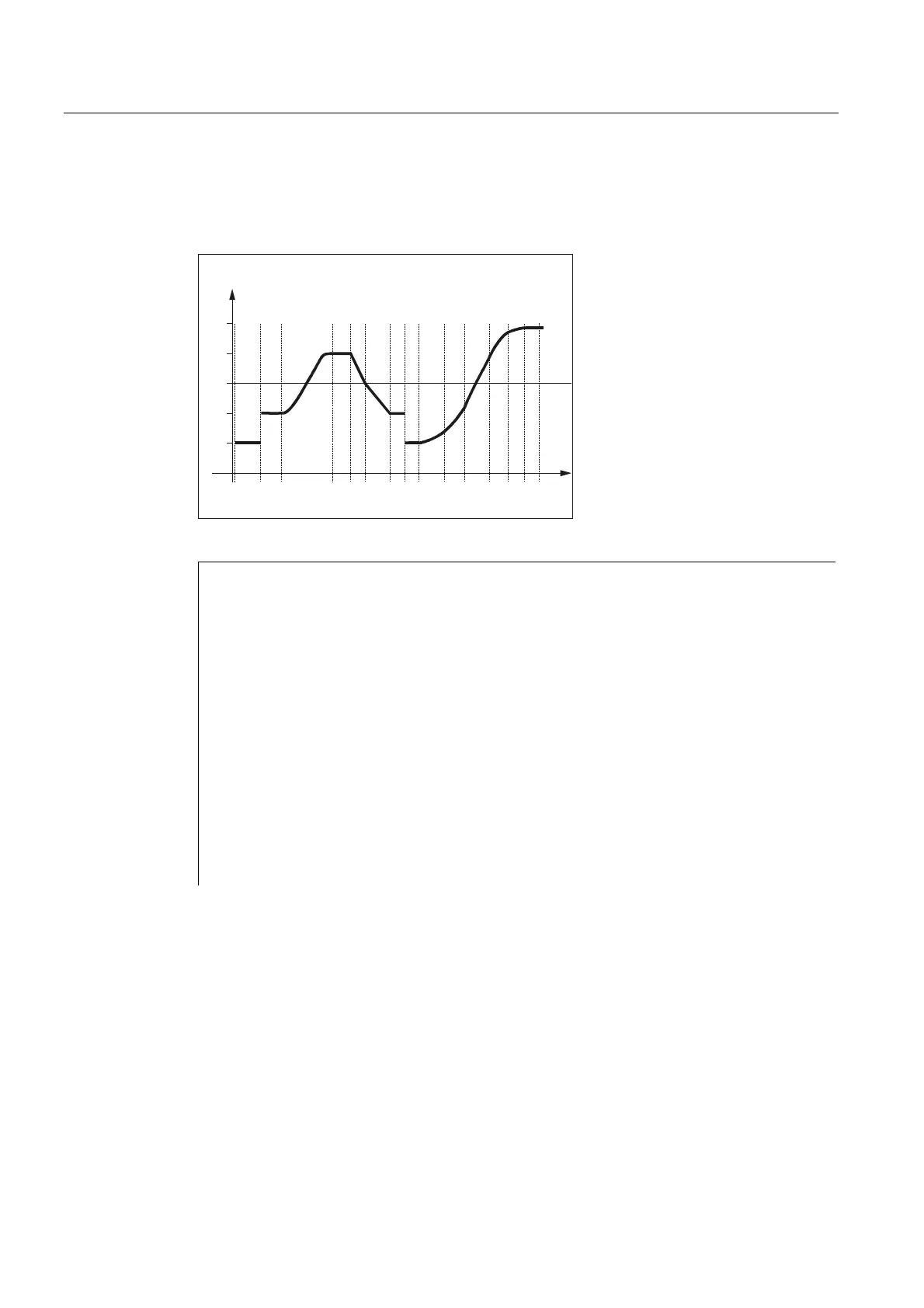
Example of various feed profiles
This example shows you the programming and graphic representation of various feed
profiles.
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
)HHG
3DWK
N1 F1000 FNORM G1 X8 G91 G64 ;Constant feed profile, incremental dimensioning
N2 F2000 X7 ;Step change in setpoint velocity
N3 F=FPO(4000, 6000, -4000) ;Feed profile via polynomial with feed 4000 at
;block end
N4 X6 ;Polynomial feed 4000 applies as modal value
N5 F3000 FLIN X5 ;Linear feed profile
N6 F2000 X8 ;Linear feed profile
N7 X5 ;Linear feed applies as modal value
N8 F1000 FNORM X5 ;Constant feed profile with abrupt change in
;acceleration rate
N9 F1400 FCUB X8 ;All subsequent, non-modally programmed F values
;are connected via splines
N10 F2200 X6
N11 F3900 X7
N12 F4600 X7
N13 F4900 X5 ;Deactivate spline profile
N14 FNORM X5
N15 X20
FNORM
The feed address F defines the path feed as a constant value according to DIN 66025.
Please refer to Programming Manual "Fundamentals" for more detailed information on this
subject.

 Loading...
Loading...



















