Tables
15.1 List of statements
Job planning
Programming Manual, 03/2006 Edition, 6FC5398-2BP10-1BA0
15-17
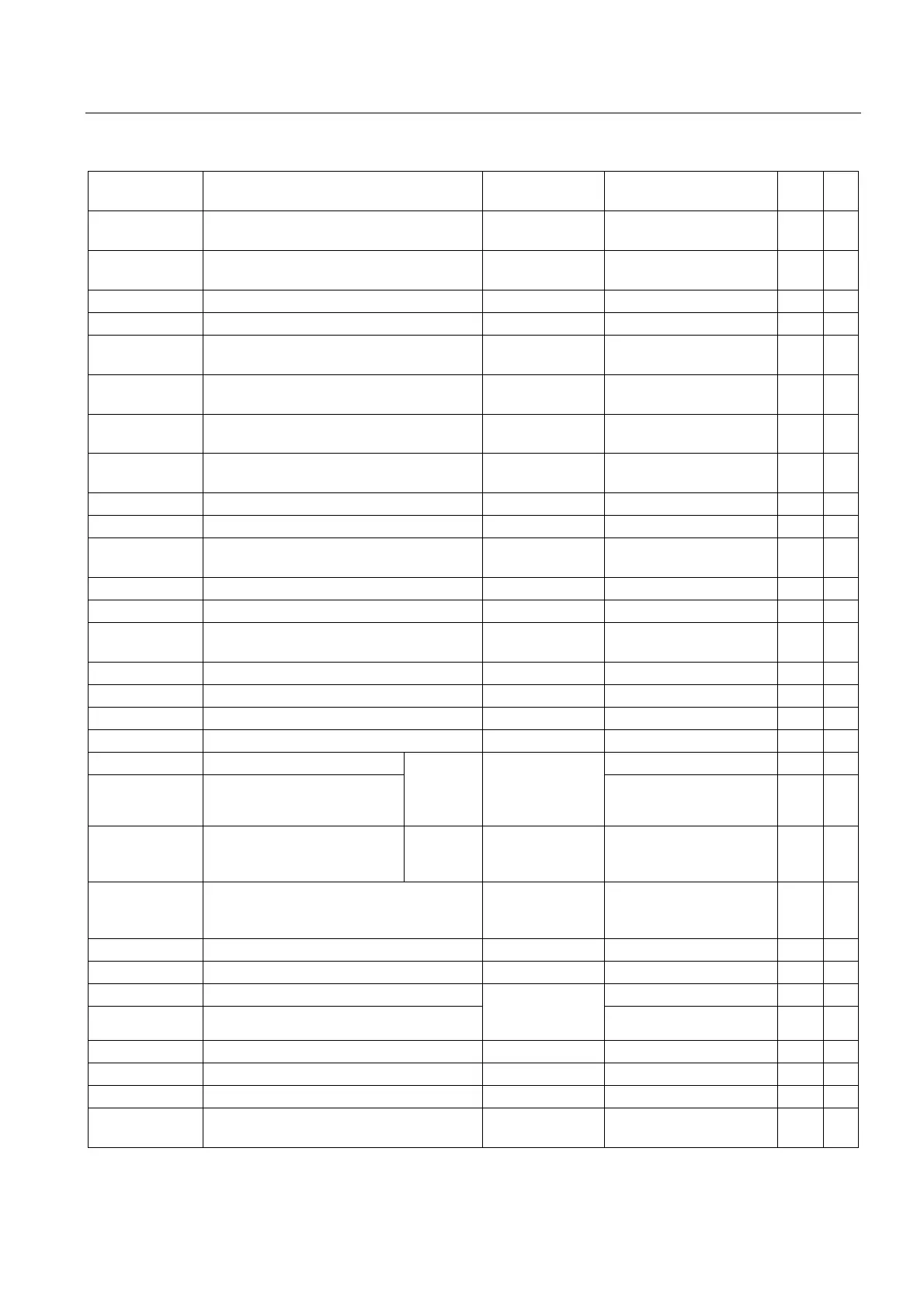
G93
Inverse-time feedrate rpm Execution of a
block: Time
G93 G01 X... F... m 15
G94
1
Linear feedrate F in mm/min or inch/min
and °/min
m 15
G95 Revolutional feedrate F in mm/rev or
inches/rev
m 15
G96 Constant cutting speed ON G96 S... LIMS=... F... m 15
G97 Constant cutting speed OFF m 15
G110 Pole programming relative to the last
programmed setpoint position
G110 X.. Y.. Z.. s 3
G111 Polar programming relative to origin of
current workpiece coordinate system
G110 X.. Y.. Z.. s 3
G112 Pole programming relative to the last valid
pole
G110 X.. Y.. Z.. s 3
G140
1
SAR approach direction defined by
G41/G42
m 43
G141 SAR approach direction to left of contour m 43
G142 SAR approach direction to right of contour m 43
G143 SAR approach direction tangent-
dependent
m 43
G147 Soft approach with straight line s 2
G148 Soft retraction with straight line s 2
G153 Suppression of current frame incl. base
frame
s 9
G247 Soft approach with quadrant s 2
G248 Soft retraction with quadrant s 2
G290 Switch to SINUMERIK mode ON m 47
G291 Switch to ISO2/3 mode ON m 47
G331 Thread tapping m 1
G332 Retraction (tapping)
± 0.001,
...,
2000.00
mm/rev
Motion
commands
m 1
G340
1
Spatial approach block (depth
and in plane (helix))
Effective during
soft approach/
retraction
m 44
G341 Initial infeed on perpendicular axis (z), then
approach in plane
Effective during
soft approach/
retraction
m 44
G347 Soft approach with semicircle s 2
G348 Soft retraction with semicircle s 2
G450
1
Transition circle m 18
G451 Intersection of equidistances
Corner behavior
with tool radius
compensation
m 18
G460
1
Approach/retraction behavior with TRC m 48
G461 Approach/retraction behavior with TRC m 48
G462 Approach/retraction behavior with TRC m 48
G500
1
Deactivate all settable frames if G500 does
not contain a value
m 8

 Loading...
Loading...


























