17
Add-On Instructions (AOI) for STUDIO5000/RSLogix5000 PLC
software
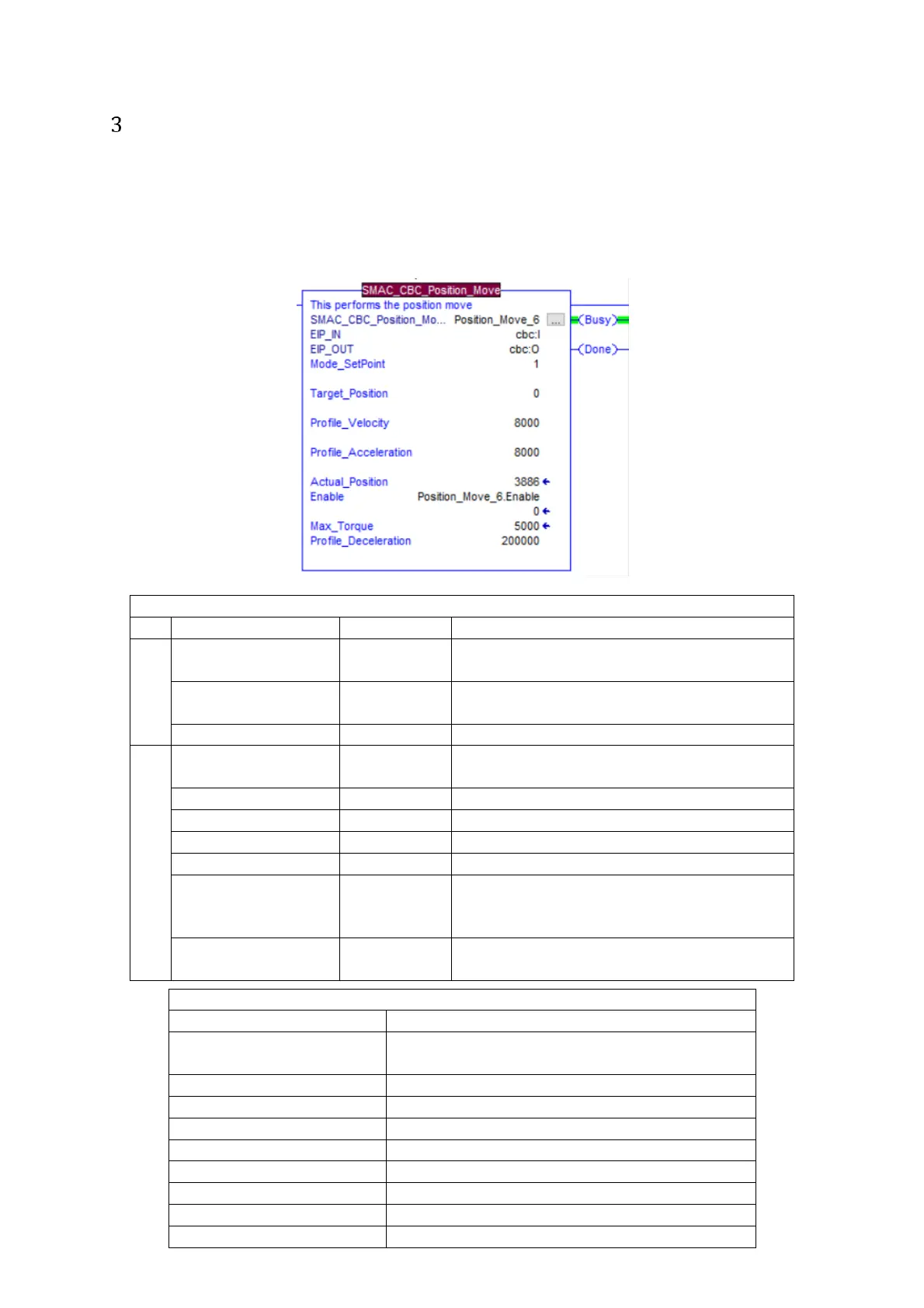
3.1 Position move
This AOI is used to perform a linear or rotary position move.
Position Move AOI: input and output parameters
This bit is active when the AOI is being
executed, until Done bit is active.
This bit is active when the target position has
been reached.
Actual position of the actuator/motor.
1: Enables absolute position move
3: Enables relative position move
Final position to be reached by the actuator
Max. velocity of the motion profiler
Max. acceleration of the motion profiler
Max. deceleration of the motion profiler
Max. permissible torque/force. Unless this
parameter is specified, the default value from
config. file is used.
Enables the AOI. Tis needs to be included in the
program after the AOI rung is energized.
Mapping between position move AOI parameters and PLC IO data assemblies
43: Position move in progress
53: Target position has been reached
Macro value of position move (Table 3)