21
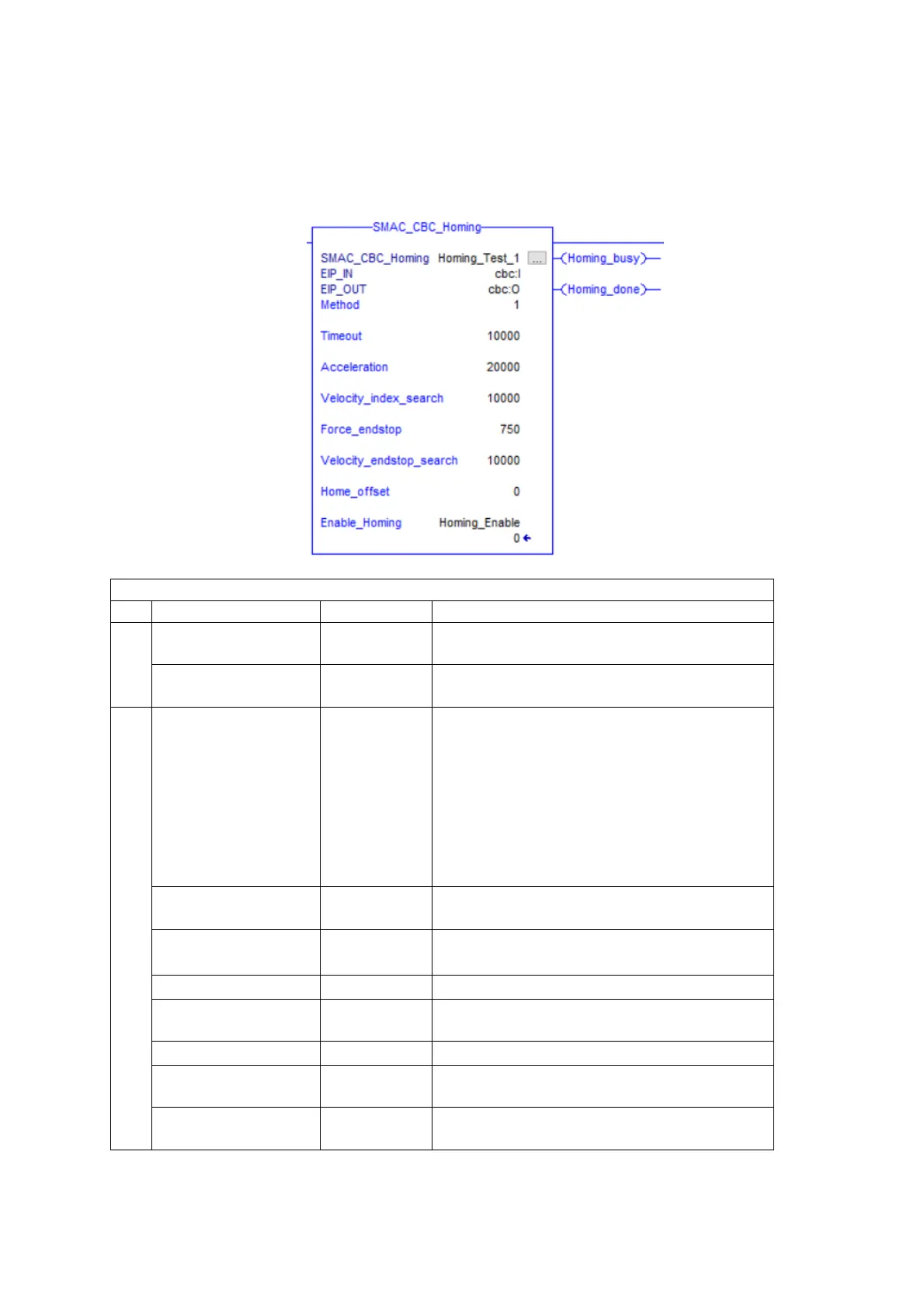
3.3 Homing Move
This AOI is used to perform Homing move.
Homing Move AOI: input and output parameters
This bit is active when the homing is complete
and actuator is at 0 position.
This bit is active when the AOI is being
executed, until the Done bit is active
This bit specifies homing methods
1: negative mech. Limit and index pulse
2: positive mech. Limit and index pulse
3: negative mech. Limit
4: positive mech. Limit
33: negative index pulse
34: positive index pulse
35: current position
This parameter is used to mention maximum
time within which the homing should complete
Velocity with which the actuator searches
index
Max. acceleration of the motion profiler
Force with which it approaches to endstop
Velocity to find the end stop during homing
User defined home position- offset the homing
position (0) from original index position
Enables the AOI. Tis needs to be included in the
program after the AOI rung is energized.