CLRS Series RS485 Closed Loop Stepper Drive User Manual
Select the PR path number by 4 digital inputs (ADD0, ADD1, ADD2, ADD3), and then start the
PR path movement by external I/O (CTRG) or RS485communication.
Include PP mode, PV mode and HM mode
Trigger methods include: double edge trigger (CTGR) or RS485 trigger
Support up to 16-segment PR positioning path
Position, velocity and Acc/Dec values can be set
Pause time or timing time can be set
Support interrupt, Overlapping, jump, etc.
The above PR functions can be controlled by RS485
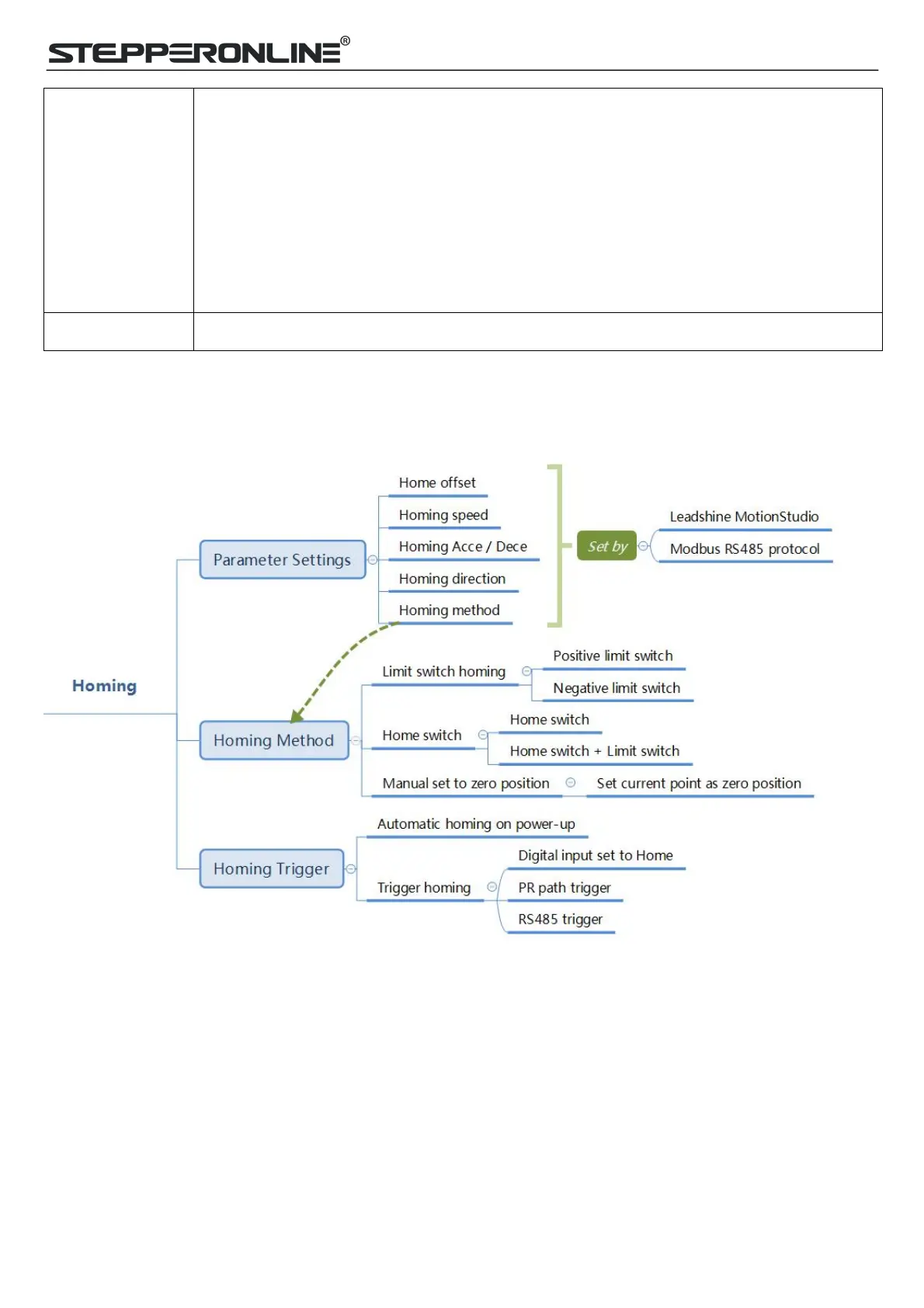
5.2 Homing / Return to Zero Position
Homing includes homing by detecting limit switch signal, homing by detecting home switch signal, set zero
position by manual, auto homing after powering on.
Zero Position: a fixed position on the machine can correspond to a definite digital input signal, or to a Z signal
Zero Point of Machine: mechanical absolute zero position
Home offset: difference between zero position and zero point of machine, the value of Object 607Ch (default =
0), Zero position= zero point + home offset
Home Switch: homing switch input signal
Negative Limit: negative limit switch input signal
Positive Limit: positive limit switch input signal
Trigger method of homing:
Automatic homing on power-up: After the drive is powered on, the motor will automatically search the zero
position.
Trigger to homing: when IO port set to Home function triggered by external level, or trigger via Modbus RS485.
Homing method:

 Loading...
Loading...


