217-8080
Talon SRX - User’s Guide
crosstheroadelectronics.com vexpro.com
Copyright 2017, Cross The Road Electronics, VEX Robotics Inc.
Updated: 2017-02-03
2.4. Performance Data
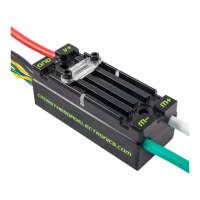
The Talon SRX was designed to provide a predictable linear response over a wide range of PWM
signals. To demonstrate its linearity, an experiment was performed by using a calibrated Talon SRX
controlled by a VEX Arm® Cortex®-based Microcontroller to drive a Mini CIM motor under no load.
The PWM signal was varied from -100% to 100% at regular intervals. Finer intervals were measured
near -100%, 0% and 100% duty cycle. During the test, the PWM signal and Mini CIM output were
recorded and plotted, as shown below.
Note: This plot should only be used to evaluate the linearity of the Talon SRX’s output. This
plot should not be used to predict a motor’s behavior at a specific input signal.
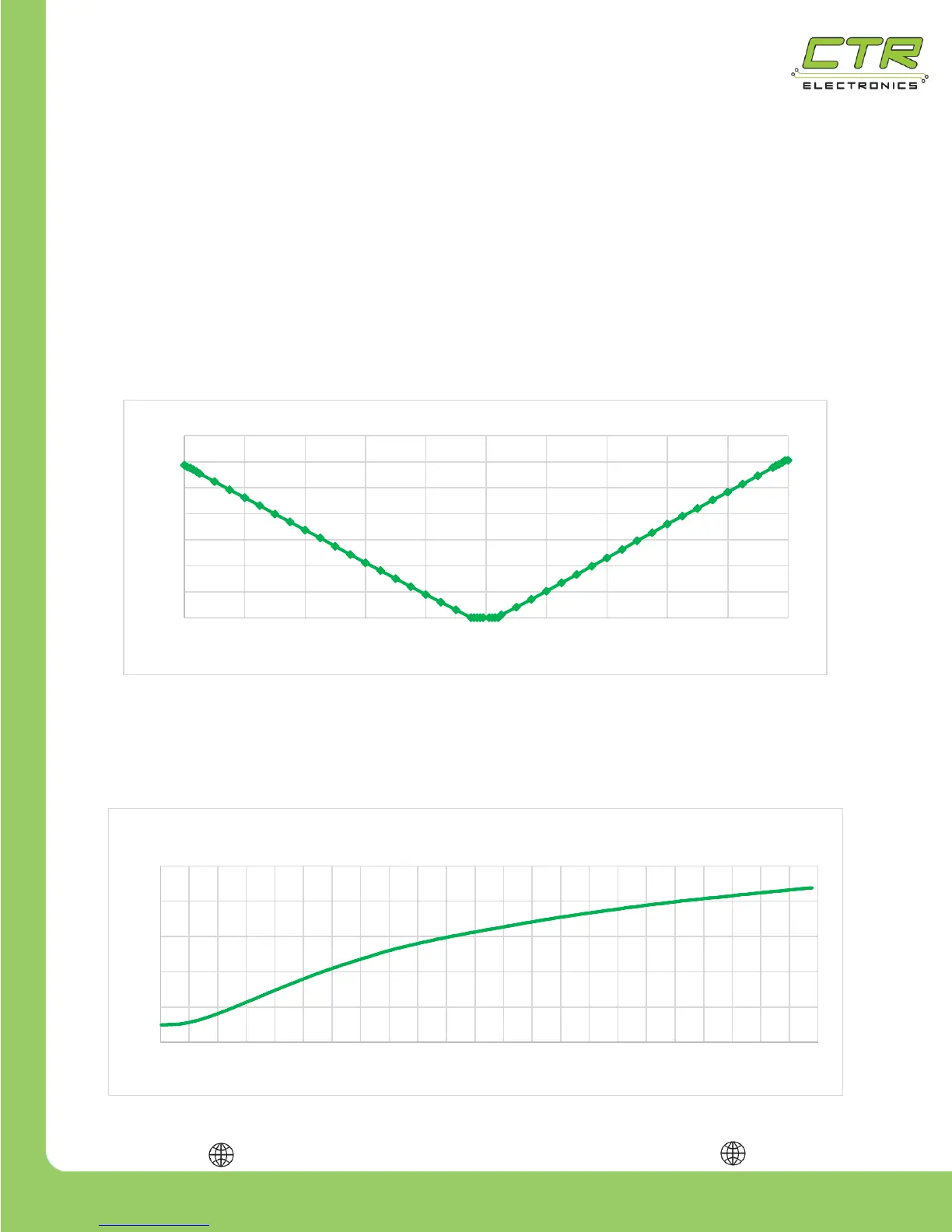
To evaluate the Talon SRX’s thermal performance, a 40A load was applied using CIM motors and a
dynamometer. Before the test, a thermocouple was attached to the top of the Talon SRX. The test
was run for 10 minutes with temperature data being recorded at one second intervals then plotted, as
shown below.
70
90
110
130
150
170
0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23
Temp (°F)
Time (Min)
Temp vs Time
100% Duty Cycle, 40A Continuous Load