Manual code 75803707A.0708
Page 36 of 64
7 USE OF THE AIR CONDITIONING UNIT
7.1 TEMPERATURE CONTROL
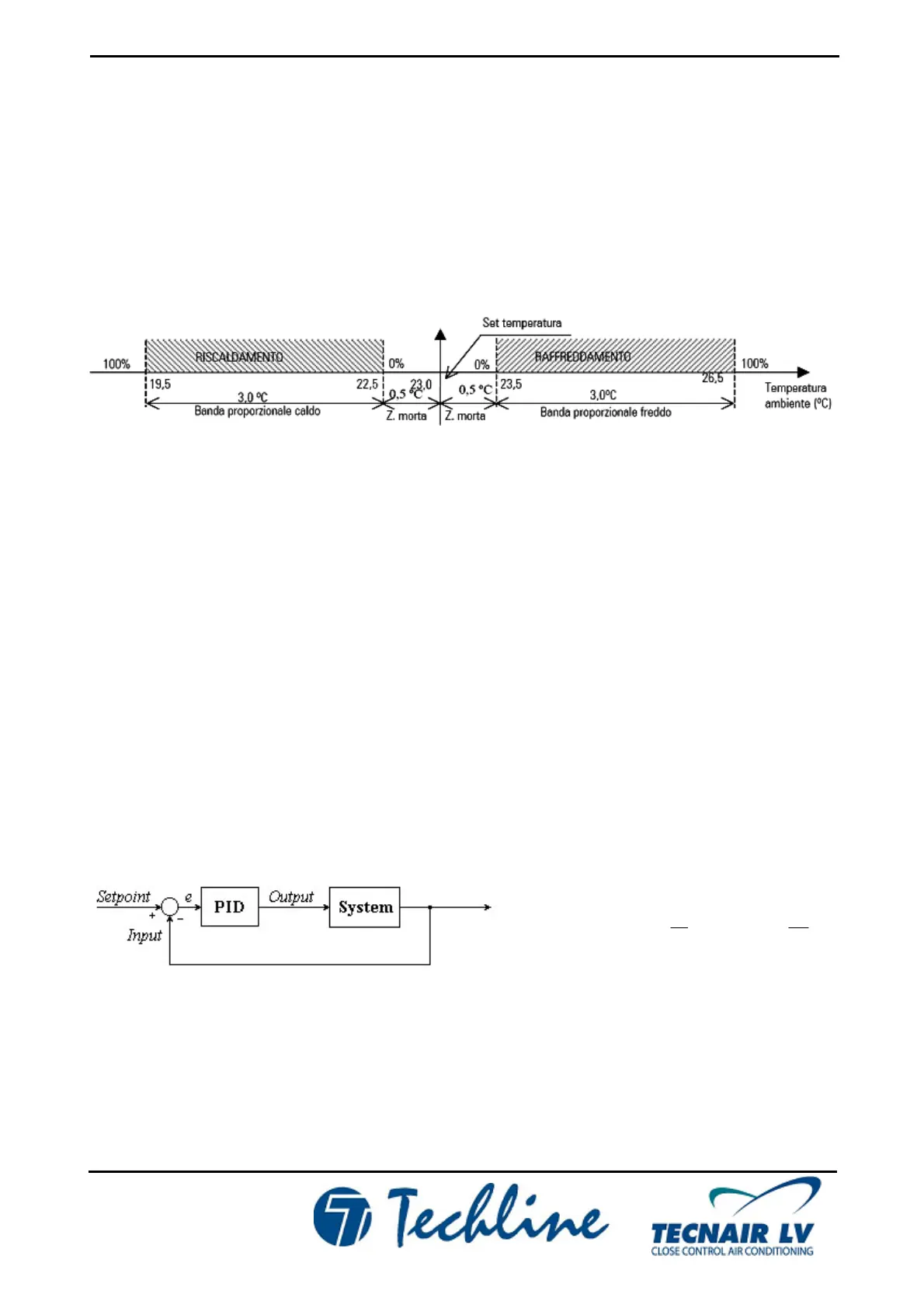
The heating and cooling devices are controlled in accordance with the temperature readings measured by the
ambient sensor (or return air sensor) This temperature reading is compared with the set-point temperature, and the
heating and cooling devices are activated according to the difference between these temperature values. The
proportional band determines the operating range of the air conditioner and may assume different values during heating
and cooling. The dead band identifies a range around set-point in which no control action takes place.
The following diagrams illustrate the behaviour of the heating and cooling devices. The percentage values
indicate the degree to which the modulating valves are opened.
7.1.1 PROPORTIONAL CONTROL
The control action is a proportional function of the difference between the desired temperature or humidity value
(set-point) and the value actually measured expressed as a percentage of the proportional band.
This mode, which is the default control mode, ensures good temperature and humidity control in normal ambient
conditions.
7.1.2 PROPORTIONAL + INTEGRAL CONTROL
The control action is a function of the percentage difference on the proportional band between the desired
temperature and the calculated average temperature in the “integration time”.
In this way the control operates on the basis of an historical log of the values assumed by the temperature
during the integration time and not just on the basis of the instantaneous temperature value. This eliminates the effect of
any sudden and temporary changes in the temperature.
This control mode can be selected in cases where there are more stringent requirements for precision control.
7.1.3 PROPORTIONAL + INTEGRAL + DERIVATIVE CONTROL
Increases system damping and stability, thus enhances the other two control actions (with their respective
benefits) while maintaining stability. The control action is effected in accordance with the function:
)*
1
(*
dt
de
Tddte
Ti
eKpOutput +⋅+=
∫
where Kp represents the proportional band, e represents the error (Input - Set-point), i.e. the difference between the
actual value and the set-point value, Tiand Td are respectively the derivation and integration times, from the time interval
taken into consideration and the error interval. We advise that initially only Proportional Control is used, adjusting the Kp
value until satisfactory operation is obtained; at this point integral control action Ti may be introduced, while
simultaneously reducing the Kp so as not to impair system stability. Finally, on introducing derivative control action Td,
the system tends to stabilise and it will therefore be possible to increase the Kp value again.
This control mode can be selected in cases where there are more stringent requirements for precision control
and the unit inlet temperatures are not constant (excessive external air).

 Loading...
Loading...