47
參數
代號
名稱與機能 預設值 單位
設定
範圍
控制
模式
通訊位址
RS232 RS485
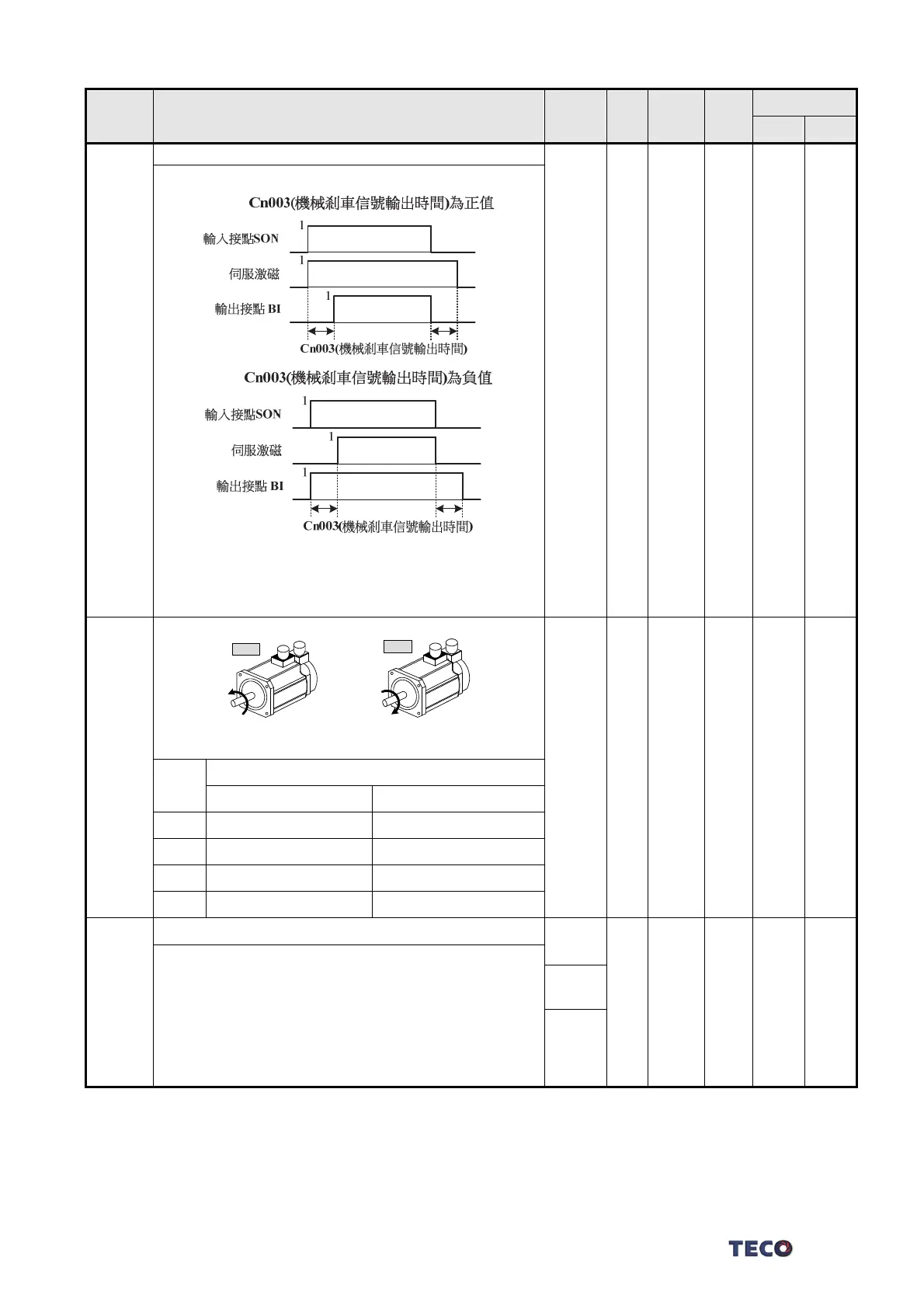
Cn003
機械剎車信號輸出時間
0 msec
-2000
│
2000
ALL 511H 0003H
時序圖如下:
註)使用此機能前,須先規劃一機械剎車信號(BI)輸出接
腳;而時序圖中,輸入/輸出接點狀態 1 代表接點動作,0
代表接點不動作。
Cn004
馬達旋轉方向定義(從馬達負載端看)
CCW
CW
當轉矩或是速度命令為正值時,從馬達負載端看的旋轉方
向設定如下:
0 X
0
│
3
S
T
512H 0004H
設定
說明
轉矩控制 速度控制
0
逆時針方向旋轉(CCW) 逆時針方向旋轉(CCW)
1
順時針方向旋轉(CW) 逆時針方向旋轉(CCW)
2
逆時針方向旋轉(CCW) 順時針方向旋轉(CW)
3
順時針方向旋轉(CW) 順時針方向旋轉(CW)
★
Cn005
編碼器信號分周輸出
2500
pulse
1
│
編碼器
一轉脈
波數(最
大
32768)
ALL 513H 0005H
分周處理表示將馬達的編碼器旋轉一轉所出現的脈波信
號個數轉換成 Cn005 預設的脈波信號個數。
例:馬達編碼器為一轉 2000pulse 輸出,若是想獲得
1000pulse 的分周輸出,請直接設定 Cn005=1000 即可。
註:依照編碼器解析度改變
2500PPR: 2500 ;8192PPR: 8192;
32768PPR:15bit、17bit
8192
32768

 Loading...
Loading...
