75
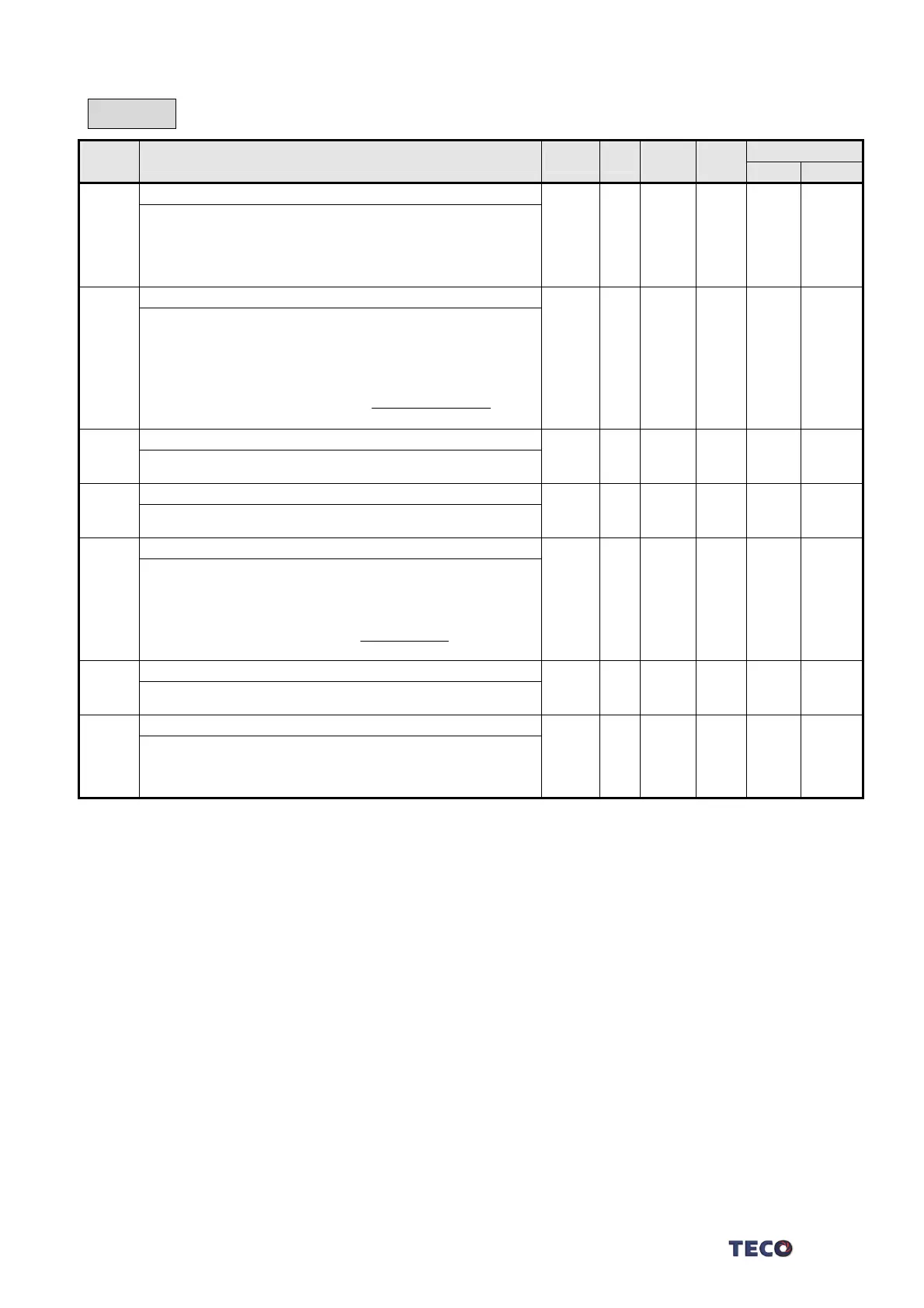
快捷參數
參數
代號
名稱與機能 預設值 單位
設定
範圍
控制
模式
通訊位址
RS232 RS485
◆
qn501
速度迴路增益 1
40 Hz
10
│
1500
Pi
Pe
S
530H 0401H
速度迴路增益直接決定速度控制迴路的響應頻寬,在機械系
統不產生振動或是噪音的前提下,增大速度迴路增益值,則
速度響應會加快。如果
Cn025(負載慣量比)設定正確,則速
度迴路頻寬就等於速度迴路增益。
◆
qn502
速度迴路積分時間常數 1
100
x0.2
ms
1
│
5000
Pi
Pe
S
531H 0402H
速度控制迴路加入積分元件,可有效的消除速度穩態誤差,
快速反應細微的速度變化。一般而言,在機械系統不產生振
動或是噪音的前提下,減小速度迴路積分時間常數,以增加
系統剛性。請利用以下公式得到速度迴路積分時間常數:
速度迴路增益
速度迴路積分時間常數
2
1
5
◆
qn503
速度迴路增益 2
40 Hz
10
│
1500
Pi
Pe
S
53AH 0403H
設定方式請參考 qn501 說明
◆
qn504
速度迴路積分時間常數 2
100
x0.2
ms
1
│
5000
Pi
Pe
S
53BH 0404H
設定方式請參考 qn502 說明
◆
qn505
位置迴路增益 1
40 rad/s
1
│
1000
Pi
Pe
55AH 0405H
在機械系統不產生振動或是噪音的前提下,增加位置迴路增
益值,以加快反應速度,縮短定位時間。一般而言,位置迴
路頻寬不可高於速度迴路頻寬,建議公式如下:
5
2
速度迴路增益
位置迴路增益
◆
qn506
位置迴路增益 2
40 rad/s
1
│
1000
Pi
Pe
551H 0406H
設定方式請參考 qn405 說明
◆
qn507
位置迴路前饋增益
0 %
0
│
100
Pi
Pe
55BH 0407H
可以減少位置控制的追隨誤差,加快反應速度,如果前饋增
益過大,有可能會造成速度過衝以及輸出接點
INP(定位完
成信號
)反覆開啟與關閉。

 Loading...
Loading...
