50
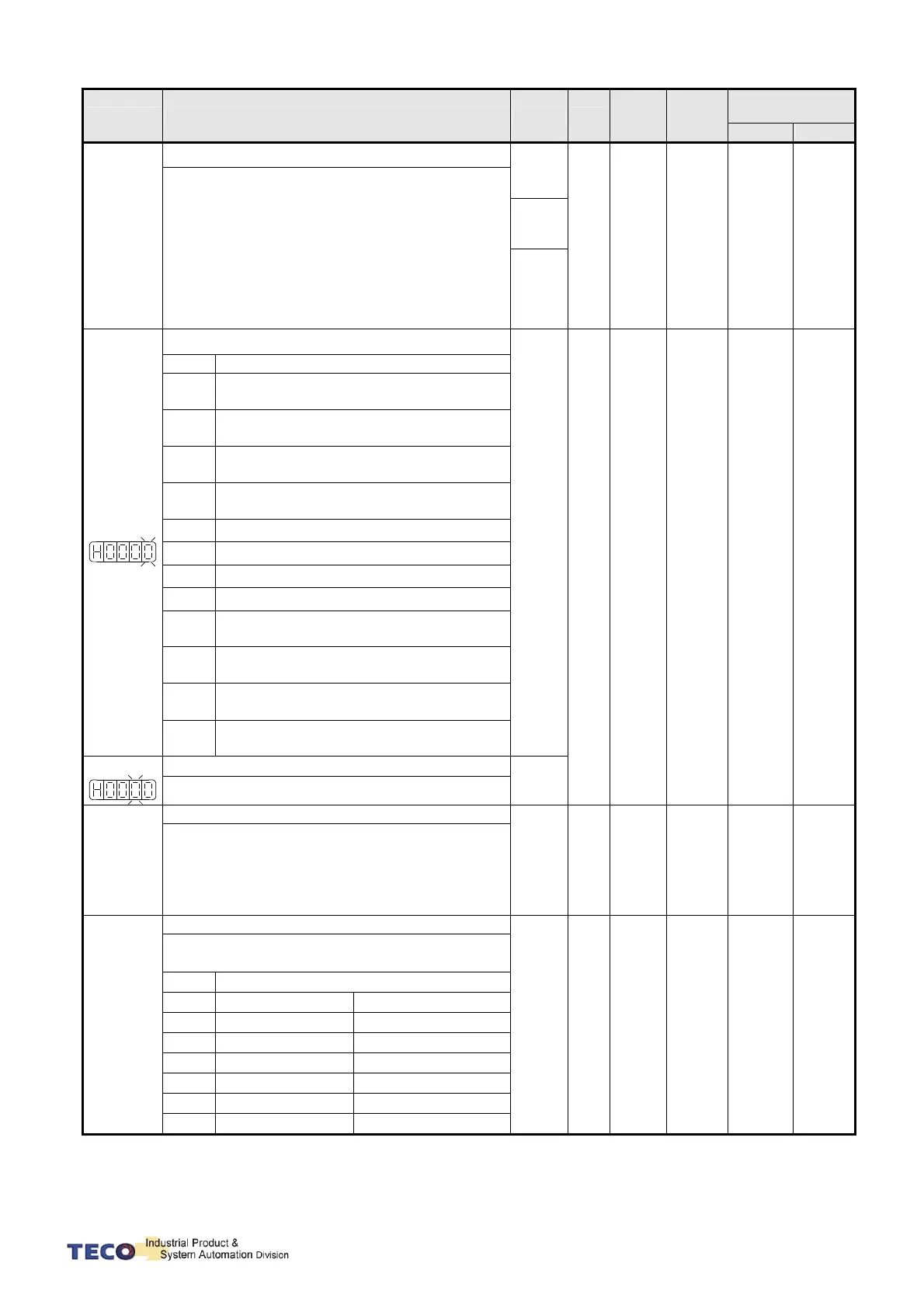
Parameter Name & Function Default Unit
Setting
Range
Control
Mode
Communication
Address
RS232 RS485
★
Cn005
Encoder pulse output scale.
2500
pulse
1
│
Encoder
pulse
per
rotation
ALL 513H 0005H
For default set to the rated encoder number of
pulses per revolution, such as 2500ppr.
Encoder ppr can be scaled by setting a ppr in the
range of 1 to the rated ppr of the encoder for
scaling purpose.
Ex:encorder rated precision is 2000 ppr, If you
setting Cn005 =1000, the output is 1000ppr.
P.S.the default depends on encorder rated precision
2500PPR:2500 ;8192PPR: 8192; 32768PPR:15bit、17bit
8192
32768
Cn006.0
Analog monitor output selection MON1
2
X
0
│
B
ALL 514H 0006H
Setting Explanation
0
Speed command
(±10V/1.5 times of the rated speed)
1
Speed feedback detection
(±10V/1.5 times of the rated speed)
2
Torque command
(±10V/1.5 times of the rated torque)
3
Torque feedback detection
(±10V/1.5 times of the rated torque)
4 Pulse command input
5 Position deviation value
6 Electrical angle
7 Main circuit (Vdc Bus) voltage
8
Speed command
(+10V/3.5 times of the rated torque)
9
Speed feedback detection
(+10V/1.5 times of the rated speed)
A
Torque command
(+10V/3.5 times of the rated torque)
B
Torque feedback detection
(±10V/3.5 times of the rated torque)
Cn006.1
Analog monitor output selection MON2
0
Refer to Cn006.0 for setting this parameter
Cn007
Speed reached preset.
Rated
rpm ×
1/3
rpm
0
│
4500
S
T
515H 0007H
Speed preset level for ClockWise or Counter
ClockWise rotation.
When the speed is greater then preset level in
Cn007 the Speed reached output signal INS will be
activated..
Cn008
Brake Mode
2 X
0
│
5
ALL 516H 0008H
Selectable Brake modes for Servo off, EMC and
CCW/CW drive inhibit.
Setting Explanation
Dynamic brakes Mechanical brakes
0 No No
1 No Yes
2 Yes No
3 Yes Yes
4* No (Under 100rpm) No
5* No (Under 100rpm) Yes

 Loading...
Loading...
